
Речь пойдет о том, как держать Arduino всегда в работоспособном состоянии. Механизм watchdog встроен в контроллеры Atmega, но, к сожалению, не всякий загрузчик (bootloader) Arduino правильно обрабатывает эту функцию. Попробуем разобраться с этой проблемой.
Итак, что такое watchdog? Простыми словами — это встроенный таймер на определенное время (до 8 сек в зависимости от чипа), который можно запустить программно. Как только таймер «дотикает» до нуля, контроллер подает правильный сигнал сброса (RESET) и всё устройство уходит в hard перезагрузку. Самое главное, что этот таймер можно сбрасывать в начальное состояние также программным способом.
- Правильный сигнал сброса — достаточный по длительности для того, чтобы контроллер начал перегружаться. Иногда есть соблазн подключить к RST входу какой-либо цифровой выход Arduino и устанавливать его в 0 когда надо перегрузиться. Это плохой подход к решению проблемы, т.к. такого сигнала может быть недостаточно по времени, хотя и не исключено, что в некоторых случаях это тоже будет работать..
- hard перезагрузка это самая настоящая перезагрузка, которая происходит при нажатии на кнопку RESET. Дело в том, что есть еще понятие soft перезагрузки — это программный переход на 0-вой адрес. В принципе, это тоже полезная вещь, но с помощью нее невозможно перегрузить зависший контроллер Ethernet или взглюкнувший LCD.
Короче говоря, встроенный watchdog это как раз то, что нужно и без дополнительных схем, пайки и соединений.
Функции Watchdog
Чтобы использовать функции Watchdog нужно подключить к проекту стандартную библиотеку:
#include <avr/wdt.h>
Теперь нам доступны следующие три функции:
1. Запуск таймера watchdog:
wdt_enable(WDTO_8S);
/* Возможные значения для константы
WDTO_15MS
WDTO_30MS
WDTO_60MS
WDTO_120MS
WDTO_250MS
WDTO_500MS
WDTO_1S
WDTO_2S
WDTO_4S
WDTO_8S
*/
Таймер будет считать ровно столько, сколько указано в константе. По истечении этого времени произойдет перезагрузка.
2. Сброс таймера watchdog:
wdt_reset();
Думаю, понятно для чего нужна эта функция — пока вы вызываете ее, контроллер не сбросится. Как только система зависнет и эта функция вызываться перестанет, то по истечении заданного периода произойдет перезагрузка.
3. Отключение watchdog:
wdt_disable();
Отключение таймера watchdog.
Собственно, на этом можно было бы и закончить наше повествование о watchdog… но дело в том, что все это работает только в Arduino Uno, а на Arduino Mega, Mini и Nano все это работает ровно наоборот, т.е. не работает совсем :)
Почему watchdog не работает на большинстве современных плат Arduino
Дело в том, что после перезагрузки, которая была вызвана watchdog, контроллеры последних выпусков оставляют включенным watchdog на минимальный период, т.е. 15ms. Это нужно для того, чтобы программа как-то узнавала, что предыдущая перезагрузка была по watchdog. Поэтому первоочередная задача загрузчика (или вашей программы, если она запускается первой) — сохранить информацию о том, что перезагрузка была «неожиданной» и сразу же выключить watchdog. Если этого не сделать, то система уйдет в bootloop, т.е. будет вечно перегружаться.
Как известно, в Arduino есть специальный загрузчик, который выполняется в первую очередь после перезагрузки системы. И, к огромному сожалению, стандартный загрузчик не сбрасывает watchdog! Таким образом, система заходит в жестокий bootloop (состояние «crazy led», при котором светодиод на 13-м пине мигает как сумасшедший).
Пути решения проблемы
Если посмотреть на исходники стандартного загрузчика (они есть в поставке платформы), то код отключения watchdog есть (!), но этот код вынесен под условную компиляцию и, по всей видимости, стандартный загрузчик скомпилирован без поддержки watchdog. По крайней мере в пакете платформы версии 1.5.2 (последней на момент написание статьи) дело обстоит именно так.
Для решения проблемы я даже прочитал man-ы самой платформы (:) и вроде бы там описана эта проблема и даже приведен код, который должен сделать всех счастливыми:
uint8_t mcusr_mirror __attribute__ ((section (".noinit")));
void get_mcusr(void) __attribute__((naked)) __attribute__((section(".init3")));
void get_mcusr(void){
mcusr_mirror = MCUSR;
MCUSR = 0;
wdt_disable();
}
Здесь описывается функция get_mcusr(), которая должна вызываться сразу после сброса. Это достигается макросом "__attribute__((section(".init3")))". Я пробовал прописывать эту функцию во все секции, которые только возможно — да, она действительно запускается до функции setup() из скетча, но, к сожалению, гораздо позже 15ms (минимальная константа watchdog) после сброса…
Короче говоря, как я ни рыл интернет в поисках легкого решения проблемы, так ничего найдено не было. Я нашел только один способ заставить watchdog работать — перепрошить загрузчик… чем мы сейчас и займемся.
Проверка работоспособности watchdog
Прежде чем что-то прошивать, нужно проверить — вдруг ваша Arduino поддерживает watchdog. Для этого я написал небольшой скетч для теста. Просто залейте его, откройте монитор порта и смотрите, что будет происходить.
#include <avr/wdt.h>
void setup() {
wdt_disable(); // бесполезная строка до которой не доходит выполнение при bootloop
Serial.begin(9600);
Serial.println("Setup..");
Serial.println("Wait 5 sec..");
delay(5000); // Задержка, чтобы было время перепрошить устройство в случае bootloop
wdt_enable (WDTO_8S); // Для тестов не рекомендуется устанавливать значение менее 8 сек.
Serial.println("Watchdog enabled.");
}
int timer = 0;
void loop(){
// Каждую секунду мигаем светодиодом и значение счетчика пишем в Serial
if(!(millis()%1000)){
timer++;
Serial.println(timer);
digitalWrite(13, digitalRead(13)==1?0:1); delay(1);
}
// wdt_reset();
}
После перезагрузки (или подключения монитора к порту) встроенный светодиод мигнет, сигнализируя о том, что запустился загрузчик. Далее в секции setup происходит включение watchdog с таймером на 8 сек. После этого светодиод отсчитает нам это время и должна произойти перезагрузка.
Далее начинается самое интересное — если перезагрузка произошла и все повторяется в такой же последовательности, то вы имеете на руках Arduino, в которой загрузчик правильно обрабатывает watchdog. Если же после перезагрузки светодиод на 13-м пине начинает бесконечно мигать, то значит загрузчик не поддерживает watchdog. Здесь даже кнопка сброса не поможет. Для последующей прошивки нужно плату отключать от питания и после включения успеть прошить до первой перезагрузки.
Я протестировал 4 вида плат и только загрузчик в Arduino Uno сработал так как надо:

Watchdog не поддерживается загрузчиком: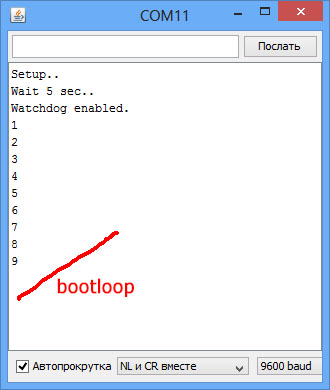 | Watchdog поддерживается загрузчиком: |
Как легче всего прошить новый загрузчик?
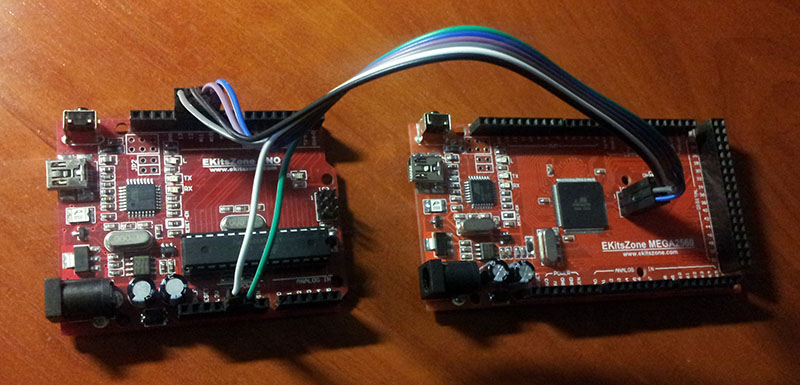
Прошивать загрузчик в Arduino можно с помощью отдельных программаторов, а можно собрать свой программатор с помощью той же самой Arduino. Т.е. любую плату Arduino можно превратить в программатор, залив туда специальный скетч.
Я не буду в этой статье описывать все премудрости создания программатора на основе Arduino, т.к. эта тема довольно подробно описана в интернете. В качестве программатора я использовал Arduino Uno. Как известно, прошивка производится через отдельный разъем ICSP, который есть почти на всех платах. В случае прошивки Arduino Pro Mini, у которого нет IСSP, подключение производится непосредственно к выводам.

Где взять загрузчик, который поддерживает watchdog?
Эта глава напоминает танцы с бубном и скорее всего можно сделать все как-то проще, но, увы, у меня по-другому не получилось.
Рекомендуется использовать загрузчики из пакета optiboot. В принципе, эти загрузчики идут в инсталляции самой платформы Arduino, но лучше скачать и установить последнюю версию optiboot отсюда. Установка заключается в двух шагах (возможно, это можно сделать как-то по-другому):
- Папка bootloaders\optiboot перезаписывается в C:\Program Files (x86)\Arduino\hardware\arduino\avr\bootloaders\optiboot
- Файл boards.txt дописывается к файлу C:\Program Files (x86)\Arduino\hardware\arduino\avr\boards.txt
Естественно, папка установки платформы Arduino у вас может быть другой.
Далее перегружается среда разработки и в меню Сервис/Плата можно наблюдать новые платы с пометкой [optiboot]. К сожалению, при выборе этих плат происходят какие-то непонятные ошибки компиляции и появляются всякие другие странности… поэтому делаем еще проще. Открываем в любом текстовом редакторе файл C:\Program Files (x86)\Arduino\hardware\arduino\avr\boards.txt и меняем следующие строчки:
Для Arduino Nano:
menu.cpu.nano.atmega328.bootloader.file=optiboot/optiboot_atmega328.hex
Для Arduino Mini:
menu.cpu.mini.atmega328.bootloader.file=optiboot/optiboot_atmega328.hex
Следующая проблема в том, что загрузчика optiboot для платы Arduino Mega не существует в природе, т.к. в Mega больше памяти и используется другой протокол. Поэтому мы используем стандартный, но модифицированный загрузчик, который качаем отсюда. Файл переименовываем в stk500boot_v2_mega2560_2.hex и записываем в папку C:\Program Files (x86)\Arduino\hardware\arduino\avr\bootloaders\stk500v2.
Далее меняем в уже знакомом файле boards.txt следующую строчку:
mega2560.bootloader.file=stk500v2/stk500boot_v2_mega2560_2.hex
Не пугайтесь, что файл модифицированной прошивки для Mega в 2 раза меньше стандартного — так вроде бы должно быть.
Процесс прошивки
После всех изменений можно прошивать загрузчики, выбирая в меню плат обычные платы (не [optiboot]!). В этом случае прошиваться будут именно те файлы hex, которые мы указали в файле board.txt.
Процесс прошивки может не стартовать и выдаваться ошибка:
avrdude: stk500_getsync(): not in sync: resp=0x00
Для решения этой проблемы откройте скетч программатора и в секции setup выберите другую скорость последовательного порта.
Во время заливки в Arduino Mega может появляться ошибка, которую следует игнорировать:
avrdude: verification error, first mismatch at byte 0x3e000
0x0d != 0xff
avrdude: verification error; content mismatch
Заключительные манипуляции
Загрузчики optiboot имеют еще одну особенность — они увеличивают скорость загрузки скетчей, поэтому при использовании плат с optiboot нужно внести соответствующие изменения в boards.txt:
Для Arduino Nano:
menu.cpu.nano.atmega328.upload.speed=115200
Для Arduino Mini:
menu.cpu.mini.atmega328.upload.speed=115200
Предыдущую скорость порта лучше тоже запомнить, т.к. ее нужно будет использовать на платах со стандартными загрузчиками. Если такие изменения не сделать, то процессе заливки скетчей будет выдаваться ошибка, типа такой:
avrdude: stk500_getsync(): not in sync: resp=0x00
Ссылки, литература
Пакет optiboot
Прошивка bootloader
Как прошить bootloader в Arduino Pro Mini
This entry passed through the Full-Text RSS service — if this is your content and you're reading it on someone else's site, please read the FAQ at fivefilters.org/content-only/faq.php#publishers. Five Filters recommends:
- Massacres That Matter - Part 1 - 'Responsibility To Protect' In Egypt, Libya And Syria
- Massacres That Matter - Part 2 - The Media Response On Egypt, Libya And Syria
- National demonstration: No attack on Syria - Saturday 31 August, 12 noon, Temple Place, London, UK
Комментариев нет:
Отправить комментарий