В прошлом году
вот тут я рассказывал о передовом процессоре для авторегов Ambarella A12. Точнее о том, что китайские производители видеорегистраторов без тени смущения обманывают отечественных автомобилистов и под соусом крутых технологических флагманов с самыми актуальными спеками предлагают глючные видеорегистраторы с низким качеством съёмки. Ничего нового – самое-самое «железо» не даёт никаких преимуществ без стабильной проработанной прошивки и пряморуких инженеров. Китайское мошенничество началось в конце 2015 года и длится до сих пор. Русский бренд AdvoCam всё это время тесно сотрудничал с Ambarella и старательно
сжав зубы от обиды за попранное китайцами большое дело «допиливал» свой собственный продукт. В мае 2018, спустя около четырёх лет разработки, вышел
AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС).

Это первый видеорегистратор в мире, который в полной мере раскрыл потенциал процессора Ambarella A12A55. Модель стоит 10 000 рублей, а снимает на уровне конкурентов за 20 000 рублей, то есть вдвое дороже. Также модель AdvoCam примечательна поддержкой Wi-Fi, карточек памяти ёмкостью до 256 Гб и продвинутым спидкамом (система оповещения о камерах контроля скорости и прочих важных объектах) с уникальным разделением на режимы «Трасса» и «Город».
Комплектация
Чего-то кардинально нового в комплекте с AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС) я не нашел. Здесь всё те же типичные для AdvoCam кабель miniUSB, крючки для прокладки кабеля, адаптер питания, CD-диск с видеоплеером (не дискета – и на том спасибо), инструкция и брошюра президента коллегии правовой защиты автомобилистов, известного теле- и радиоведущего Виктора Травина. Брошюрку рекомендую не закидывать на антресоли, а держать в салоне автомобиля. В ней Травин очень доступно объясняет, что делать с записью с регистратора в случае аварии. Зачем? Когда ты на нервах после происшествия, коротко и по делу изложенные простым и понятным языком советы будут как нельзя кстати.



Крепление и установка
AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС) крепится на лобовое стекло при помощи кронштейна с вакуумной присоской. Весь процесс установки займёт не больше минуты: обезжирить поверхности стекла и присоски (в идеале, хотя скажем прямо – обычно так никто не делает) – прижать кронштейн присоской к стеклу – повернуть фиксатор до щелчка – подсоединить регистратор к кронштейну. Шарнирное крепление позволяет поворачивать камеру не только в стороны, но и направить в салон автомобиля. Мало ли что там снять нужно будет – например, поведение неадекватного пассажира, если вы таксист.

Приёмник ГЛОНАСС/GPS встроен в кронштейн, а не в корпус регистратора. Грамотное решение, которое позволило изолировать чувствительное радиоприёмное устройство от помех, создаваемых «внутренностями» регистратора. Иначе пришлось бы экранировать электронику в корпусе, что, несомненно, прибавило бы «копеечку» к ценнику регистратора.

Ещё один бесспорный плюс устройства – питание подаётся в регистратор не напрямую, а через крепление. Это серьёзно упрощает процессы установки и снятия камеры, потому что каждый раз подключать/извлекать кабель нет никакой нужды. Кстати, и гнездо miniUSB в этом случае прослужит гораздо дольше, потому что его не будут расшатывать частыми механическими воздействиями.
Электропитание в AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС) поступает по трёхметровому кабелю (хватит для прокладки хоть в кабине грузовика или автобуса), который снабжён адаптером от прикуривателя. Последний с лёгкой руки производителя оборудован USB-разъёмом для зарядки смартфона или планшета. Быстрой зарядки какого-нибудь iPad от 1 А ждать не следует, но как минимум по чуть-чуть прибавлять проценты батареи смартфона адаптер в состоянии.

Внешний вид
Экспериментировать с дизайном AdvoCam не стал – это всё тот же фирменный вытянутый корпус с закруглёнными краями, традиционный для всех моделей линейки FD8. К слову, и золотистая фронтальная вставка – отличительный знак регистраторов серии Gold – также присутствует. Напомню, в серии FD8 также есть модели AdvoCam-FD8 Black-GPS (чёрная вставка вокруг объектива) и AdvoCam-FD8 Red-II (GPS+ГЛОНАСС) (красная вставка). Был еще и AdvoCam-FD8 Profi-GPS Blue (голубая вставка), но его быстро сняли с производства из-за плохих продаж. Причина банальная – отечественные покупатели регистраторов (а это в основном мужчины) негативно восприняли аппарат с цветовой отсылкой к гомосексуалистам.

Дизайн корпуса с золотыми вставками также нравится далеко не всем — некоторые пользователи воспринимают золотистую вставку как откровенную цыганщину и видят модель не иначе как в узорах Louis Vuitton. Серьезно, я уже встречал в обзорах вот такую картинку.

Но, вопреки распространённому мнению, цветная накладка – это вовсе не элемент декора или любви ко всему блестящему и золотому. Предполагается, что такого яркого «молчаливого свидетеля» заметят и инспектор, и другие желающие вступить с вами в диалог участники движения, что, возможно, несколько поумерит их пыл. Понятное дело, «блестящий» аппарат лучше не оставлять в машине на время своего отсутствия, дабы не вызывать желания у несознательных граждан похитить аппарат.
С тыльной стороны устройства расположен крупный 2,7-дюймовый дисплей. В качестве альтернативы Wi-Fi не помешает, тем более лишнего места он не занимает. За счет соотношения сторон 16:9 дисплей (а с ним и корпус) вытянутый и в высоту совсем небольшой. Слева и справа от экрана – сдвоенные клавиши управления. Кнопки слева позволяют включить и отключить экран и микрофон, а также перемещаться по пунктам меню. Кнопки с правой стороны – «ОК», старт/остановка записи, а также ручная аварийная пометка файла (для защиты от перезаписи и удаления). В общем, типичное для устройств AdvoCam управление, да и вообще для регистраторов с подобной расстановкой клавиш.

На верхнем торце находятся кнопки, ответственные за включение/отключение питания, подсветку и мгновенное фото, а также AV-выход, miniUSB-порт и контактная площадка крепления.


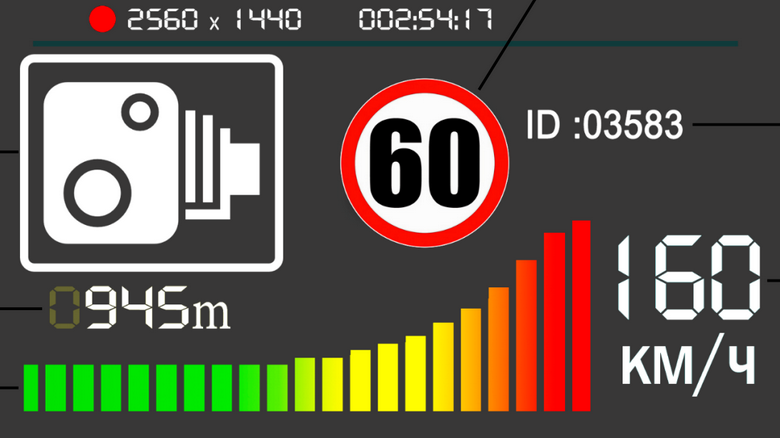
Справа от объектива – слот для microSD. Поддерживаются карты ёмкостью вплоть до 256 Гб, что довольно редко встречается на рынке регистраторов (максимум – 64 Гб). Такого объёма памяти, 256 Гб, хватит на сутки беспрерывной записи в максимальном разрешении 2560 х 1440 точек.

На левом торце расположился HDMI-разъём для просмотра записей на экране компьютера или телевизора. К слову, хотелось бы узнать у читателей – вы сами или ваши знакомые хоть раз пользовались этим разъемом в регистраторе? Честно говоря, на мой взгляд, реальная польза от HDMI – примерно на уровне LED-подсветки. То есть, никакая.

Настройки и дополнительные функции
Ёмкость батареи – 250 мАч, чего хватит минут на 15 автономной работы. Новичку, как и его предшественникам AdvoCam-FD Black-II GPS+ГЛОНАСС и AdvoCam-FD8 RED-II, досталась одна весьма интересная особенность. При минусовой температуре зарядка аккумулятора блокируется автоматически, что позволяет избежать губительного воздействия перепада температур на батарею. В частности – зимой, когда автомобилисты на ночь оставляют камеру в салоне, а после морозной ночёвки устраивают регистратору «тёплый прием» с зарядкой в нагреваемом салоне. Тут-то мы и становимся свидетелями главного источника причины номер один обращения владельцев авторегов в сервисы – «смерти» батарей.

Вздувшийся из-за перепада температур аккумулятор дорогого тайваньского видеорегистратора Mio
Ещё одна функция видеорегистратора, которой, впрочем, сегодня уже никого не удивишь – спидкам. Только в новом AdvoCam она получила серьёзное развитие. Устройство по-прежнему предупреждает о приближении к стационарным радарам ГИБДД, пешеходным переходам, камерам проезда на красный свет, опасным перекресткам и так далее, всего поддерживаются 12 типов объектов. Но ко всему этому прибавилось ещё и разделение на два режима: «Город» и «Трасса».
Вот для чего это нужно в спидкам-интерпретации. Скорость автомобиля при передвижении по городским дорогам и по междугородней трассе сильно различается. Очевидно, что за городом потребуется больше времени, чтобы плавно снизить скорость до разрешенной на конкретном участке. В настройках можно установить дистанцию оповещения для «Города» – это 300, 500 или 700 метров, а для «Трассы» – 1000, 1200, 1500 метров. Подобное разделение давно стало обязательным для любого гибрида или радар-детектора. В общем-то с той же целью – чтобы обеспечить разные дистанции предупреждений. Но «сольном» регистраторе подобное я увидел впервые, именно в новинке AdvoCam.
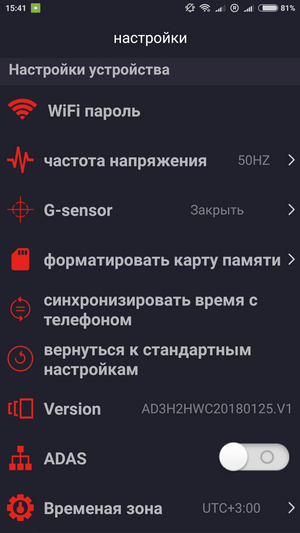
Герой этого обзора – первая модель AdvoCam, в которой реализована поддержка Wi-Fi (если не считать снятый с производства гибрид регистратора и экшн-камеры – AdvoCam-FD Sport). Для использования беспроводной связи сначала необходимо скачать мобильное приложение WiFi-CarDV (доступно в Google Play и App Store, в бумажной инструкции к регистратору даже есть QR-коды). Затем выбираем из списка сетей в смартфоне пункт ADVOCAM-XXXX, вводим пароль «123456789» и подключаемся. В аппарате функция Wi-Fi не включена по умолчанию и требует ручной активации. К слову, премиальные корейские регистраторы Thinkware с ценником от 15 000 рублей тоже работают по такой схеме. По всей видимости, разработчики справедливо решили, что постоянно поддерживать соединение нет никакой необходимости. А если пользователю срочно потребуется удалённый доступ к записям, «сконнектить» смартфон с регистратором – дело десятка секунд.
Работа с приложением не должна вызвать никаких сложностей – оно максимально простое. Трансляция с камеры идёт прямо на главный экран, в нижней его части расположены три красные кнопки – «Видеолист» (просмотр фото- и видеоматериала), «Скриншот» и «Старт/остановка съемки».

Кнопка списка настроек регистратора расположена в верхнем правом углу экрана. Но с её помощью получится настроить только основные параметры вроде разрешения видеозаписи или продолжительности видеофрагментов (1, 3 или 5 минут). Зато порадовал удалённый просмотр видео, он запускается практически мгновенно, переключение между роликами происходит тоже достаточно быстро.
Разработчики пошли на хитрость – регистратор, по сути, работает в два видеопотока. Первый – с оригинальным, заданным в настройках разрешением. Второй поток – 720p, такие ролики гарантированно и без подтормаживаний запустятся по Wi-Fi на любом современном смартфоне. А тормозить они не будут в том числе потому, что битрейт очень даже лайтовый – всего 2500 Кбит/с. В десять раз ниже по сравнению с тяжеловесными 1440p-роликами.

Однако переброска видеоматериала (не просто просмотр, а именно переброска) в память смартфона потребует времени – на копирование одной минуты видео в 1440p уйдет до 60 секунд (что, впрочем, характерно практически для любых регистраторов с поддержкой Wi-Fi). Не скажу, что потоковое воспроизведение видео прямо с карты регистратора – уникальная функция новинки, но она реально очень редко встречается в регистраторах с Wi-Fi, даже среди премиальных корейцев.
Конечно, G-сенсор (датчик удара) в новинке тоже присутствует. А ещё разработчики снабдили новый AdvoCam и функцией LDWS. Благодаря этой системе регистратор может спасти случайно уснувшего за рулем водителя, выдав громкий звуковой сигнал о съезде автомобиля с текущей полосы. Только не стоит забывать, что для нормальной работы этой функции требуется чистое, ровное, хорошо освещенное дорожное полотно с чёткой разметкой. Без снега, воды и грязи. Так что LDWS, как показывает практика, адекватно работает в основном в летний сезон и в светлое время суток.
«Железо» и съемка видео
Видеочасть новоиспеченного представителя линейки AdvoCam представлена шестиэлементным объективом со стеклянными линзами из просветлённого стекла, флагманским CMOS-сенсором OmniVision OV4689 (США) и уже упомянутым выше топовым американским процессором Ambarella A12A55. Повторюсь, отечественные инженеры AdvoCam на собственном производстве AdvoCam в городе Александров Владимирской области неплохо «поколдовали» над «содержимым» регистратора. И, как следствие, максимально раскрыли все возможности продвинутого чипсета Ambarella A12. Угол обзора составляет 135 градусов по диагонали, в кадре просматриваются четыре полосы, искажения по периметру картинки отсутствуют.
Производитель предлагает следующие варианты разрешения видеосъёмки:
2560 x 1440, 30к/с;
2560 x 1440, 30к/с (HDR);
2304 х 1296, 30к/с;
1920 x 1080, 30к/с;
1920 x 1080, 60к/с;
1920 x 1080, 30к/с (HDR);
1280 x 720, 60к/с.
Благодаря новому процессору выбирать между сверхчёткой съёмкой 1296р и 1080р с HDR (как это происходит в регистраторах на Ambarella A7) не нужно – самое высокое разрешение Quad Full HD 2560 x 1440 точек поддерживает ещё и HDR-съёмку. А это весомый плюс при записи видео в сложных условиях вроде плохой освещённости или яркого солнца. HDR совмещает два кадра с разными экспозициями в один, после чего достигается лучшая детализация даже в тёмное время суток и при встречном солнце. С перепадами освещения и засвечиванием номеров машин наш сегодняшний обозреваемый автогаджет тоже справляется «на отлично».


Самое главное, что есть в новом AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС). По качеству съёмки AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС), на мой достаточно опытный взгляд, обходит любых конкурентов в ценовом диапазоне до 20 000 рублей. При цене самого устройства, напомню, в 10 000 рублей. Соперничать на равных или обойти новый русский продукт могут разве что премиальные корейцы.
Днём картинка выше всяких похвал – чёткая, яркая, с насыщенными цветами и минимумом засветов, с равномерной контрастностью по всему полю. С читаемостью госномеров тоже полный порядок, если не сказать больше – в дневной съёмке номерные знаки автомобилей различимы с 16-17 метров, ночью – с 10-12 метров. За 10 000 рублей обычно регистраторы других брендов предлагают показатели ниже минимум на 3-5 метров.
В ночной съёмке AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС) тоже показал себя более чем достойно. Как я уже указывал, видимость госномеров до 12 метров по прямой. Картинка ясная, четкая, минимум засвеченных госномеров.


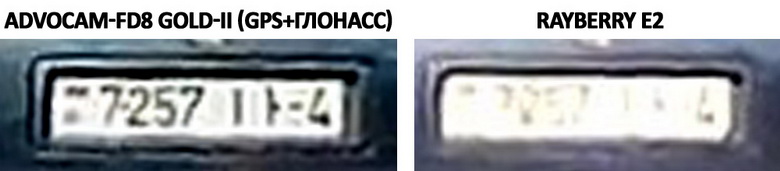
Конечно, я не мог обойтись без сравнительного испытания. В прошлый раз я наглядно показал, что даже топовый AdvoCam на базе процессора прошлого поколения Ambarella A7LA70 снимает лучше, чем сделанный на «коленке» китайский Dome DAB202 (напомню – один из первых регистраторов на Ambarella A12). На этот раз оппонентом выступит опять же продукт наших восточных соседей – дешманский RayBerry E2, который помимо Ambarella A12A55 в спецификации завлекает в том числе светосильным (F/1.8) семилинзовым объективом.

Кстати, к подобным характеристикам китайцев следует относиться со скепсисом – уж очень они любят приврать. В самом деле, кто, да и как будет проверять правдивость характеристик? Забегая вперед, скажу – на эту ремарку я отвлекся лишь потому, что в итоге так и не увидел соответствия картинки формальным характеристикам объектива. Справедливо и другое: за отсутствием работы инженеров над прошивкой и настройкой всего видеотракта «процессор-матрица-объектив» вряд ли будет заметна особая разница даже между качественным светосильным «глазком» и каким-нибудь дешевым аналогом с пластиковыми линзами.
Все сравнения я проводил в разрешении 1440p с HDR. Посмотрим на результаты.


В дневных сценах AdvoCam показывает более высокий запас расстояния с чёткими госномерами. RayBerry E2 сразу начинает сыпать теми же «болячками», что я уже видел в дешманском Dome DAB202. Баланс белого неестественно желтит, но самое главное – задранная экспозиция. Особенно это видно по небу, которое вместо насыщенного синего (естественного цвета) становится светло-голубым.

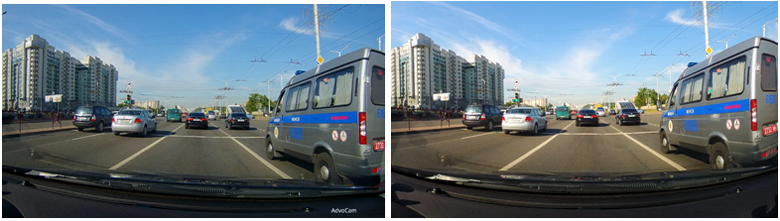
А вот наглядный стресс-тест для регистратора. Почему-то я не встречал обозревателей, которые оценивают способность камеры противостоять попутному яркому солнцу. Ведь наше «светило» засвечивает госномера не хуже, чем фары встречного авто ночью. Что мы и видим – в то время как у AdvoCam никаких проблем, RayBerry демонстрирует едва различимый номер автомобиля впереди.

Тут более низкий запас чёткости плюс засветка сошлись вместе. Госномер автомобиля справа заметно засвечен, а по прямой – попросту едва различим.

Слева – AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС), справа – RayBerry E2

Выезд из-под моста. Если впереди случится авария, вряд ли RayBerry позволит рассмотреть её с ракурса автомобиля, в котором установлен регистратор.

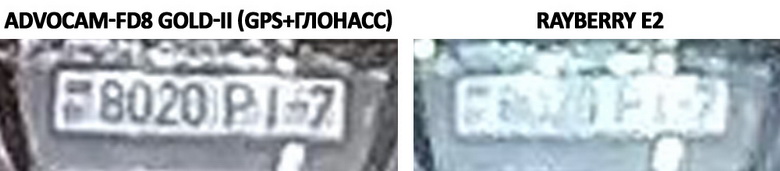

Ночные примеры в свете уже изученных нами стоп-кадров выглядят ожидаемыми. Низкая четкость и полная засветка госномеров – непременные спутники RayBerry. Напротив, модель AdvoCam показывает отсутствие проблем с четкостью и ясностью картинки, если за аппаратом стоят опытные русские инженеры, а не криворукие китайцы.
Вывод
AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС) – вероятно, по совокупности факторов лучший однокамерный видеорегистратор середины 2018 года. Новинка при адекватном ценнике в 10 тысяч рублей снимает в сверхвысоком разрешении Quad Full HD 2560 х 1440 точек (что почти в два раза детальнее в сравнении с «простым» Full HD). Причём на уровне аппаратов вдвое дороже – с ценой тысяч 20 рублей. Да ещё и предлагает целый ряд полезных особенностей, таких как копирование и просмотр записей на смартфоне через Wi-Fi, улучшенная двухрежимная система спидкам, поддержка карт объёмом до 256 Гб и удобное сквозное питание через кронштейн. И это, не говоря уже о традиционном для всех моделей AdvoCam высоком качестве сборки и адаптации к русским условиям эксплуатации (устойчивость к «минусам» вплоть до -35 °C и тряске на дорогах).
Из недостатков модели отмечу, пожалуй, ограниченный перечень настроек, доступных пользователю при удаленном подключении (по Wi-Fi) и отсутствие комплектной карточки microSD. Но это мелочи в сравнении с тем, что наши российские инженеры первыми в мире наконец-то смогли «выжать» максимум из топового американского видеопроцессора Ambarella A12. В отличие от корейцев с Thinkware F800PRO, где пошли по более лёгкому пути и ограничились съёмкой в Full HD при ценнике в 22 000 рублей.
Как ни крути, вряд ли AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС) станет хитом продаж. Своё звание бренда номер один по продажам регистраторов в России AdvoCam и дальше будет поддерживать моделями до 7 000 рублей. Это объективная реальность – в России начиная с ценника в 8-9 тысяч рублей массовый спрос устремлён к гибридам. С другой стороны, AdvoCam-FD8 Gold-II (GPS+ГЛОНАСС) определённо найдет своего покупателя. Порядка 70% обратившихся ко мне на почту за советом по выбору регистратора изначально готовы потратить 7-10 тысяч именно на «сольный» регистратор, без функционала радар-детектора.
P.S. Напоминаю читателям – по вопросам выбора регистраторов или иным моментам тематики автомобильных регистраторов не стесняйтесь обращаться ко мне на мою личную электронную почту schub.alexandr@yandex.ru. Отвечаю каждому, кто мне пишет!
Let's block ads! (Why?)
























{kind=link}