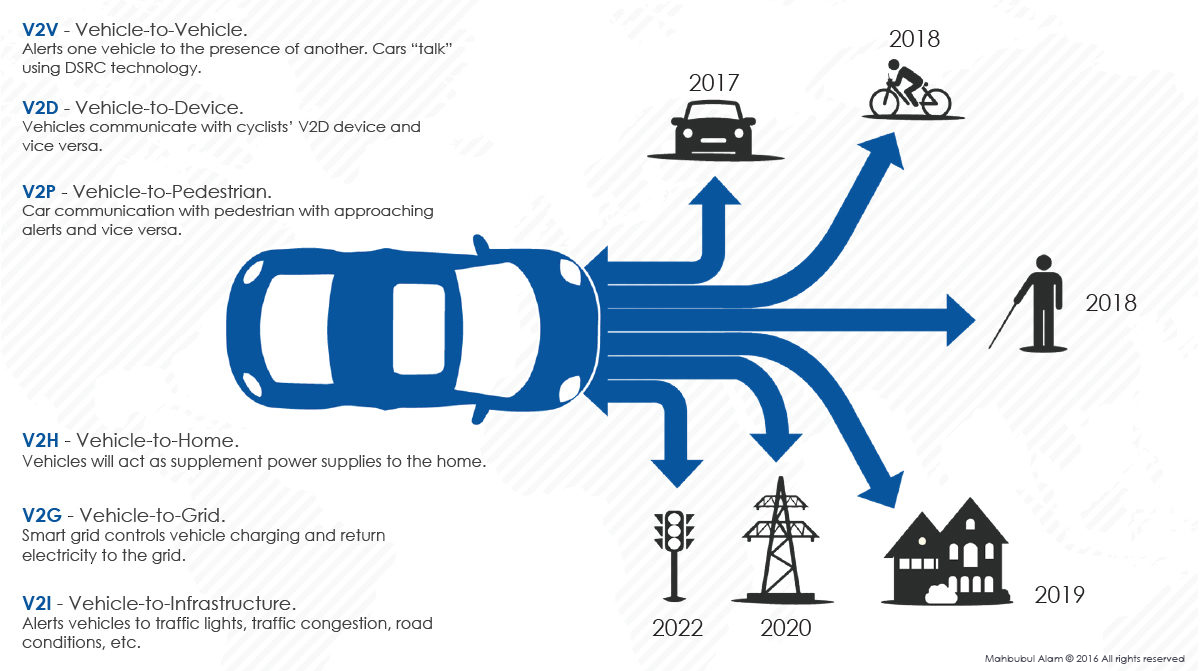
Уже много лет назревает битва за полосу радиочастотного спектра, которая была выделена 20 лет назад для коммуникаций в транспортных средствах, в частности для передачи информации между самими транспортными средствами (vehicle-to-vehicle) и связи между транспортными средствами и инфраструктурой (vehicle-to-infrastructure), также известной как V2X (Vehicle-to-everything).
Для этих коммуникаций был создан протокол, и за последние десятилетия было проведено множество экспериментов и демонстраций, но широкое производство все еще кажется очень отдаленным и так будет до тех пор, пока каждый автомобиль не будет отгружаться с таким оборудованием в течение хотя бы 10 лет.
В ноябре 2019 года председатель федеральной комиссии по связи (FCC) Аджит Пай заявил, что ожидание затянулось, и рекомендовал комиссии перераспределить желанные 75 мГц пропускной полосы в области диапазона 5.9 гГц. Его предложение состоит в том, чтобы перевести 45 мГц в нелицензированный спектр вроде того, который использует протокол Wi-Fi, и оставить 20 мГц для обновленного протокола V2X, основанного на LTE, который называется C-V2X. Он оставляет открытым вопрос о том, будут ли оставшиеся 10 МГц также использоваться для C-V2X или могут могут быть оставлены для использования более старым протоколом DSRC.
Полагаю, те, кто читал наши статьи раньше знают, что связь V2X постигла судьба голого короля. Она едва ли полезна и представляет угрозу компьютерной безопасности. Также очень сложно, практически невозможно, запустить сетевую технологию, которая будет требовать своего наличия у всех устройств вокруг еще до того, как начнет приносить пользу.
Нелицензированный спектр был одним из самых крупных дел FCC за последние десятилетия. Как правило, FCC предоставляет монополии на спектр конкретному владельцу или под конкретное применение. Если вы владеете каким-либо спектром и получаете помехи от кого-то, кто незаконно в нем вещает, то вы обращаетесь в FCC и требуете отключить нарушителя.
В случае с нелицензированным спектром все было наоборот. Им никто не владеет, он не отведен под какое-либо предназначение и если от кого-то идут помехи (ниже определенных пределов мощности), то это не их проблема, а ваша. Вам нужно выяснить как бороться с помехами. Этот переворот подтолкнул инженеров к высокой креативности, и за эти годы мы увидели в области нелицензированной передачи величайшую революцию в истории радио. От WiFi до Bluetooth, ZigBee, LoRa и многих других протоколов интернета вещей с низким энергопотреблением, мы наблюдаем взрыв возможностей, несмотря на соответствующий взрыв использования и помех. Все радостно приветствуют нелицензированные коммуникации и их расширение. Диапазон DSRC находится рядом с существующим нелицензированным диапазоном, что позволяет производителям оборудования для диапазона 5.8 гГц использовать увеличенную ширину канала.
Департамент транспорта и поклонники DSRC будут недовольны и постараются вернуть все как было. Меньшее количество полос усложняет их планы (они скажут, что делает их невозможными, и будут неправы), потому что они планировали все исходя из убеждения, что весь спектр будет отведен под их пользование в области автомобильной связи. Они смогут подстроиться под использование меньшего диапазона.
Я предложил комитету план получше, который заключался в том, что весь диапазон будет сделан нелицензированным с одной оговоркой: любой, кто будет вещать на этой частоте с мобильных устройств (автомобилей или смартфонов) будет обязан реализовать некоторый протокол дорожной безопасности для этого устройства. В результате примерно через 2 года этот протокол будут поддерживать все новые сотовые телефоны, а через 2 года 90% автомобилей будут содержать в себе устройство, поддерживающее этот протокол.
Сравните это с планом департамента транспорта, требующим наличия протокола во всех недавно проданных автомобилях, начиная с 2-3 лет после выпуска федерального мандата. Чтобы это выполнялось в половине автомобилей на дороге потребуется время до 2030 года. Таким образом можно было бы предотвратить четверть несчастных случаев – но только через 10 лет.
Разумеется, протокол работающий между телефонами не будет иметь такое же проникновение радиопередачи, как у антенны, стоящей сверху автомобиля. Телефоны лежат на сиденьях автомобилей и устанавливаются на приборные панели. Некоторые из них не подключены к зарядным устройствам, а значит не имеет необходимой мощности. Но система, которая работает на 20% хуже, но присутствует почти во всех автомобилях к 2023 году лучше той, которая к этому же времени будет присутствовать только в 10% автомобилей. Сотовые телефоны обновляются каждые 1-2 года, и их заменяют на более новые и обладающие более совершенными технологиями.
Производителям телефонов это понравится. «Вам нужно купить iPhone 13! Это может спасти вам жизнь!», — производители телефонов отчаянно нуждаются в способах сделать каждый новый телефон по-настоящему уникальным. В то же время, во все машины устанавливают Wi-Fi-приемники, поэтому через подключение к антенне на крыше в них работает вещание между автомобилями, которое так хотят люди. Они также могут иметь усилитель сигнала, чтобы сделать сигнал с любого мобильного телефона более надежным.
Если технология может быть реализована в телефоне, то она побеждает. Ничто не может соревноваться из-за масштабов выпуска и частоты обновления сотовых телефонов.
Конечно, автомобильный протокол должен разбираться с помехами. Звучит страшно, но на самом деле это просто новая задача для инженеров, с которой они очень хорошо справляются.

Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.
Читать еще полезные статьи:



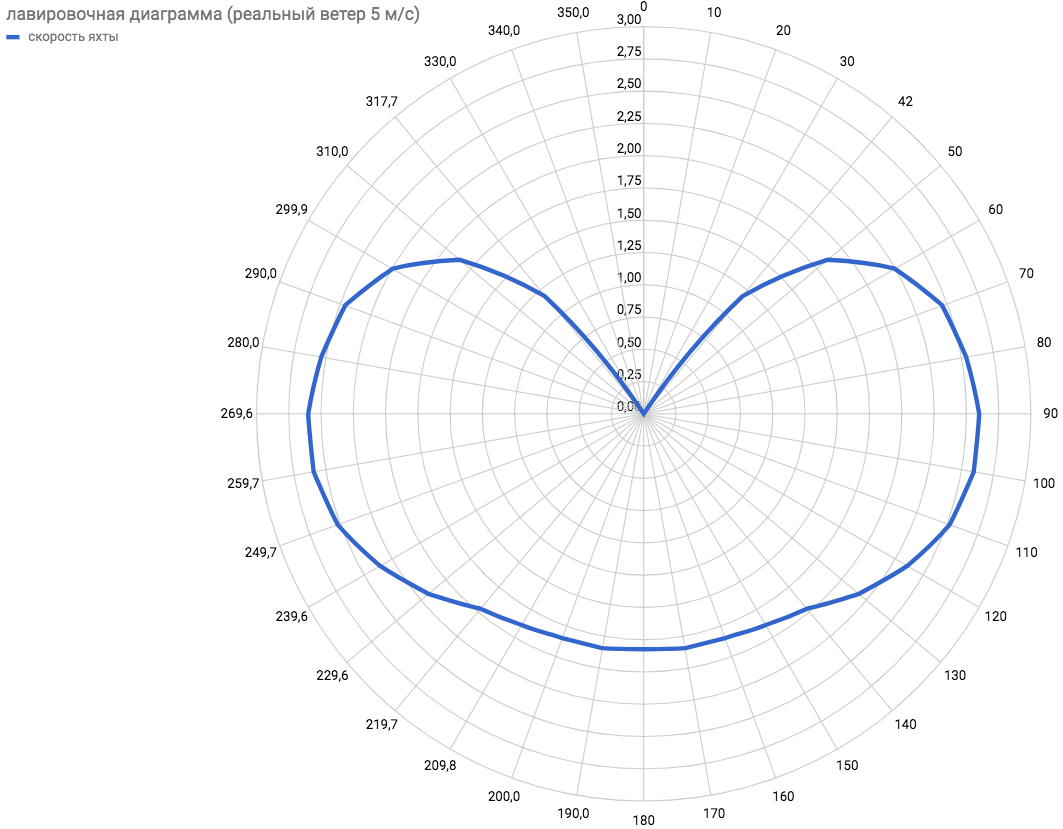 С помощью ее уже можно планировать маршруты на карте по прогнозу ветров. Дополнительно стало понятно, что минимально возможный угол , а максимальная скорость движения против ветра достигается с курсовым углом для ветра 5 м/с.
С помощью ее уже можно планировать маршруты на карте по прогнозу ветров. Дополнительно стало понятно, что минимально возможный угол , а максимальная скорость движения против ветра достигается с курсовым углом для ветра 5 м/с.