
Введение
Топливо из резервуара окислителя и резервуара горючего поступает в камеру сгорания ракетного двигателя. Синхронная подача топлива в заданной пропорции обеспечивает эффективную работу ракетного двигателя.
Эффективная работа зависит от точного измерения уровня топлива в баке. Для этой цели топливный бак имеет систему управления топливом. Система представляет собой вертикальный измерительный канал с датчиками внутри канала для фиксации свободного уровня жидкости в канале [1]:
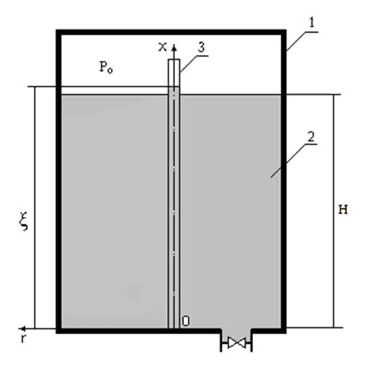
Рисунок. Схема топливного бака. 1- резервуар, 2- топливо, 3- измерительный канал, Po — давление газа,  — уровень жидкости в канале, H — уровень жидкости в баке, r,x — координатные оси.
— уровень жидкости в канале, H — уровень жидкости в баке, r,x — координатные оси.
Вертикальный канал и топливный бак являются сообщающими сосудами. При снижении уровня топлива в баке, уменьшается и уровень топлива в измерительном канале. Когда уровень топлива в канале достигает датчика, происходит активация датчика. Сигнал поступает в систему управления топливом.
В результате расхода топлива его уровень в баке меняется. Таким образом, уровень топлива в канале должен определять уровень топлива в баке. Проблемы две. Первая методическая состоит в том, что свободная поверхность топлива в баке не совпадает с поверхностью топлива в канале.
Вторая проблема в колебаниях уровня при изменении ускорений ракеты в полёте, что приводит к ложным срабатываниям датчиков и, как следствие, к погрешностям измерения.
Ошибка измерения уровня топлива приводит к неэффективному расходу топлива. В результате ракетный двигатель работает не оптимально, а в танках может оставаться «лишнее» количество топлива.
Далее рассмотрим, как можно определить методическую погрешность от первой проблемы и уменьшить погрешность измерения от второй.
Чтобы не отправлять читателя по ссылке [1], приведу здесь вывод дифференциального уравнения движения жидкости в измерительном канале, заодно исправив математические и грамматические ошибки.
Во время полёта t уровень жидкости H в топливном баке изменяется согласно соотношения:
(1)
где:
–начальный уровень топлива в баке; V– скорость изменения уровня топлива.
При введенной системе координат (смотри рисунок), уравнение для нестационарного движения вязкой несжимаемой жидкости в измерительном канале будет иметь вид:
(2)
При граничных
и начальных
условиях.
где: u(r,t) — скорость жидкости в канале; p — давление; ρ — плотность; время — t; v — кинематическая вязкость; g- ускорение силы тяжести.
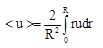
Получим соотношение для средней скорости в измерительном канале:
Умножая левую и правую части уравнения (2) на r, запишем отдельные члены уравнения движения:
(3)
где:
трение;
трение стенки;
динамическая вязкость; R- радиус цилиндрического канала.
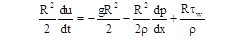
Используем уравнения (3) и записываем уравнение (2) в виде (скошенные скобки со средней скоростью в дальнейшем опущены):
или
(4)
Выберем в цилиндрическом канале объем жидкости двумя поперечными сечениями на расстоянии
. Запишем для выбранного объёма баланс давления и трения:
, получаем соотношение:
(5)
Используем уравнение Дарси-Вейсбаха
объединив его с (5) получим:
, отсюда соотношение для трения жидкости о стенки измерительного канала примет вид:
(6)
где λ– коэффициент гидравлического трения.
Подставим (6) в уравнение (4) и получим следующее выражение:
(7)
Рассчитаем градиент давления при следующих условиях: давление линейно уменьшается от давления наддува над свободной поверхностью топлива до давления
. Градиент давления с учётом (1) будет равен:
(8)
Подставив (8) в соотношение (7), получим окончательное дифференциальное уравнение для уровня жидкости в измерительном канале:
(9)
С начальными условиями Коши, вида:
(10)
Решим дифференциальное уравнения (9) с начальными условиями (10)[2].
Рассмотрим условия измерения уровня жидкости в топливных баках ракеты с целью выбора метода обработки измерительной информации, используя решение уравнения (9)
а) Измерение уровня в условиях отсутствия шумов в измерительном канале и колебаний топлива. Зависимость результатов измерения уровня от времени полёта ракеты определяется с использованием следующей программы:
# -*- coding: utf8 -*-
import numpy as np
from scipy.integrate import odeint
import matplotlib.pyplot as plt
R=0.0195 # радиус измерительного канала в м
H=8.2# начальный уровень в топливном баке, в м
g=9.8# ускорение свободного падения в м/с2
L=4.83*10**-2# коэффициент гидравлического трения
V=0.039# средняя скорость изменения уровня жидкости в м/с
def f(y,t):
y1,y2=y
return [y2,-g+(g*(H-V*t)/y1)+((L/(4*R))*y2**2)]
t = np.arange(0,10,0.01)
y0=[H,0]
[y1,y2]=odeint(f,y0,t,full_output=False).T
plt.title('Измерение уровня топлива при отсутствии помех')
plt.ylabel('H,m')
plt.xlabel('t,s')
plt.plot(t,y1,"b",linewidth=2,label='Уровень топлива в измерительном канале ')
y=H-V*t
plt.plot(t,y,"--r",linewidth=2,label='Действительный уровень топлива в баке')
plt.grid(True)
plt.legend(loc='best')
plt.show()
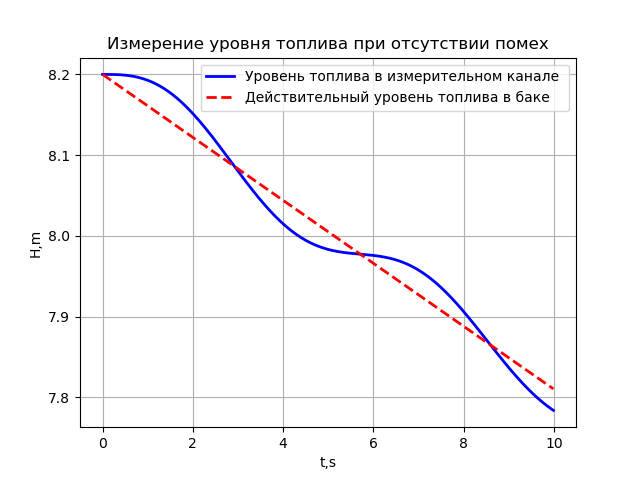
Это кажущееся решение первой проблемы (за счёт градуировки) при отставании уровня в измерительном канале от уровня в баке. Поскольку в реальных условиях эксплуатации колебания уровня и шумы датчиков вносят существенную погрешность в измерение.
б) Измерение уровня в условиях нормально распределённых случайных колебаний и шумов с дисперсией 0.1. Зависимость результатов измерения уровня от времени полёта ракеты определяется с использованием следующей программы:
# -*- coding: utf8 -*-
import numpy as np
from scipy.integrate import odeint
import matplotlib.pyplot as plt
R=0.0195 # радиус измерительного канала в м
H=8.2# начальный уровень в топливном баке, в м
g=9.8# ускорение свободного падения в м/с2
L=4.83*10**-2# коэффициент гидравлического трения
V=0.039# средняя скорость изменения уровня жидкости в м/с
def f(y,t):
y1,y2=y
return [y2,-g+(g*(H-V*t)/y1)+((L/(4*R))*y2**2)]
t = np.arange(0,10,0.01)
y0=[H,0]
[y1,y2]=odeint(f,y0,t,full_output=False).T
y1= np.array([np.random.normal(x,0.1) for x in y1])#наложение шума на результат измерений
plt.title('Измерение уровня в условиях нормально распределённых случайных \n колебаний и шумов с дисперсией 0.1')
plt.ylabel('H,m')
plt.xlabel('t,s')
plt.plot(t,y1,"b",linewidth=2,label='Уровень топлива в измерительном канале ')
y=H-V*t
plt.plot(t,y,"--r",linewidth=2,label='Действительный уровень топлива в баке')
plt.grid(True)
plt.legend(loc='best')
plt.show()
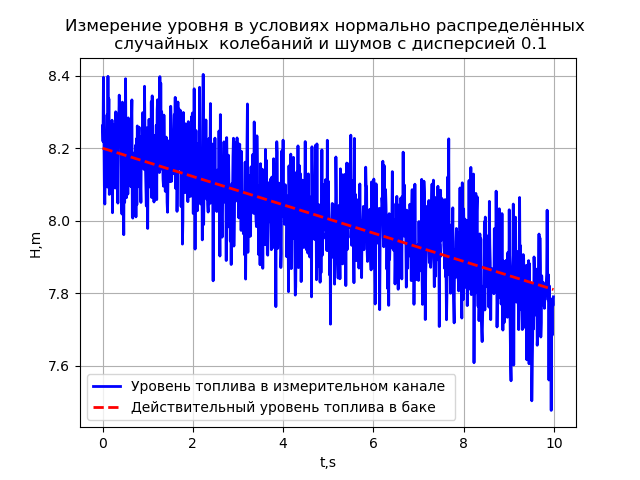
Приведенный результат подтверждает вывод о том, что измерение уровня в таких условиях с приемлемой погрешностью в несколько процентов от диапазона невозможно.
г) Измерение уровня в условиях нормально распределённых случайных колебаний и шумов с дисперсией 0.1 с использованием фильтра Калмана. Зависимость результатов измерения уровня от времени полёта ракеты определяется с использованием следующей программы:
# -*- coding: utf8 -*-
from scipy.integrate import odeint
import matplotlib.pyplot as plt
from numpy import*
from pykalman import KalmanFilter
R=0.0195
H=8.2
g=9.8
L=4.83*10**-2
V=0.039
def f(y,t):
y1,y2=y
return [y2,-g+(g*(H-V*t)/y1)+((L/(4*R))*y2**2)]
t = arange(0,10,0.01)
y0=[H,0]
[y1,y2]=odeint(f,y0,t,full_output=False).T
y=array(H-V*t)#действительный уровень топлива
measurements = array([random.normal(x,0.1) for x in y1])
kf = KalmanFilter(transition_matrices=[1] ,#матрица перехода
observation_matrices=[1],#матрица наблюдения
initial_state_mean=measurements[0],#среднее начальное состояние
initial_state_covariance=1,#ковариация начального состояния
observation_covariance=1,#ковариантность наблюдения
transition_covariance= 0.001) # ковариантность перехода
state_means, state_covariances = kf.filter(measurements)#среднее начальное, начальная ковариация
state_std = sqrt(state_covariances[:,0])
plt.figure()
plt.title('Измерение уровня топлива с использованием фильтра Калмана')
plt.ylabel('H,m')
plt.xlabel('t,s')
plt.plot(measurements, '-r', label='измерение уровня топлива')
plt.plot(state_means, '-g', label='kalman-выход фильтра')
plt.plot(y, '-k', label='действительный уровень топлива')
plt.legend(loc='best')
plt.figure()
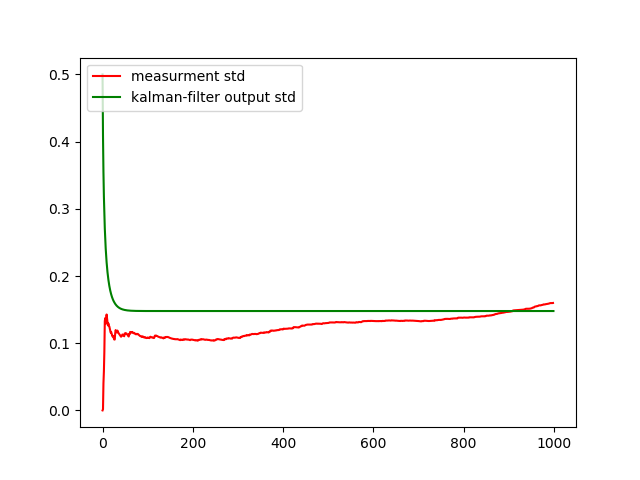
measurement_std = [std(measurements[:i]) for i in arange(1,len(measurements),1)]
plt.plot(measurement_std, '-r', label='measurment std')
plt.plot(state_std, '-g', label='kalman-filter output std')
plt.legend(loc='upper left')
plt.show()
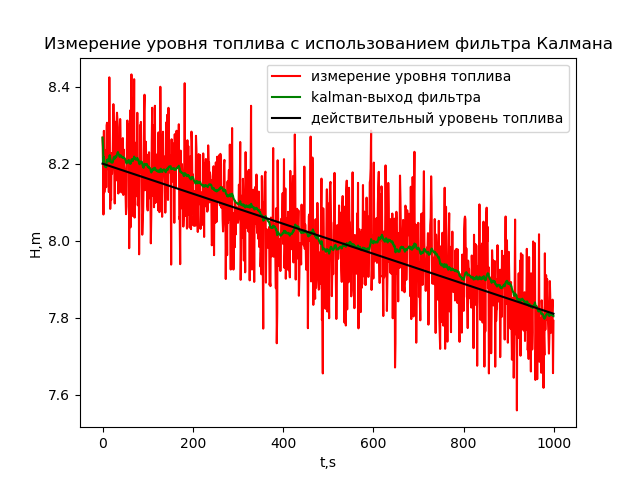
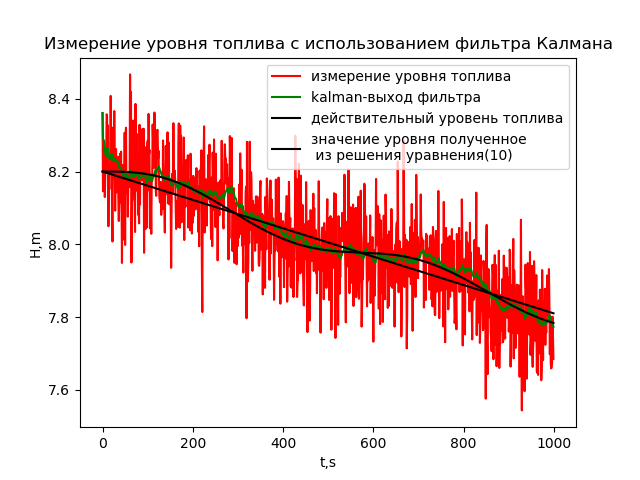
Как видно из графика, фильтр отсеял случайные составляющие и усреднил значения. Однако, фильтр Калмана «ещё умнее» и, при определенной настройке, может даже снизить методическую погрешность:
Выводы
Измерение уровня жидкости в топливных баках ракеты в условиях нормально распределённых случайных колебаний уровня и шумов датчиков с дисперсией 0.1 возможно только с использованием фильтра Калмана.
Ссылки
1. Измерение уровня жидкости в топливном баке ракеты.
Комментариев нет:
Отправить комментарий