В этом нам поможет суровый Марвин Мински, который своим беспощадным разумом анализирует чувства, эмоции, боль, влюбленность и сознание.
§5-7. Воображение
«Мы не видим вещи, как они есть. Мы видим вещи как мы их видим.»
— Анаис Нин
Когда Кэрол подбирает один из блоков, это действие кажется невероятно простым для неё: она попросту тянется к блоку, берёт его и поднимает. Она видит блок и просто начинает действовать. Кажется, что никакого «мышления» тут нет.
Однако, кажущаяся «простота» окружающего мира – это иллюзия, которая проистекает из нашей неспособности ощутить его сложность. Ибо, большая часть того, что мы видим проистекает из наших знаний и воображения. Таким образом, рассмотрим портрет Авраама Линкольна, сделанный моим старым другом Леон Хармоном – пионером в области компьютерной графики. (Слева находится портрет который я сделал из Леона)

Как же вы определяете настолько невыраженные черты, например нос или глаза, которые представляют собой лишь три или четыре точки светлого и тёмного цветов, на показанной фотографии? Очевидно, вы делаете это благодаря вашим дополнительным знаниям. Например, когда вы сидите за столом перед своими друзьями, вы не видите ни их ног, ни их спины, однако ваша внутренняя система мозга основанная на знаниях предполагает по умолчанию наличие этих невидных деталей. Таким образом, мы воспринимаем наши перцептивные таланты как нечто само собой разумеющееся, и наше «видение мира» кажется нам простым только потому что остальная часть ума находится в неведении о процессах, которые мы используем для восприятия зрительных образов.
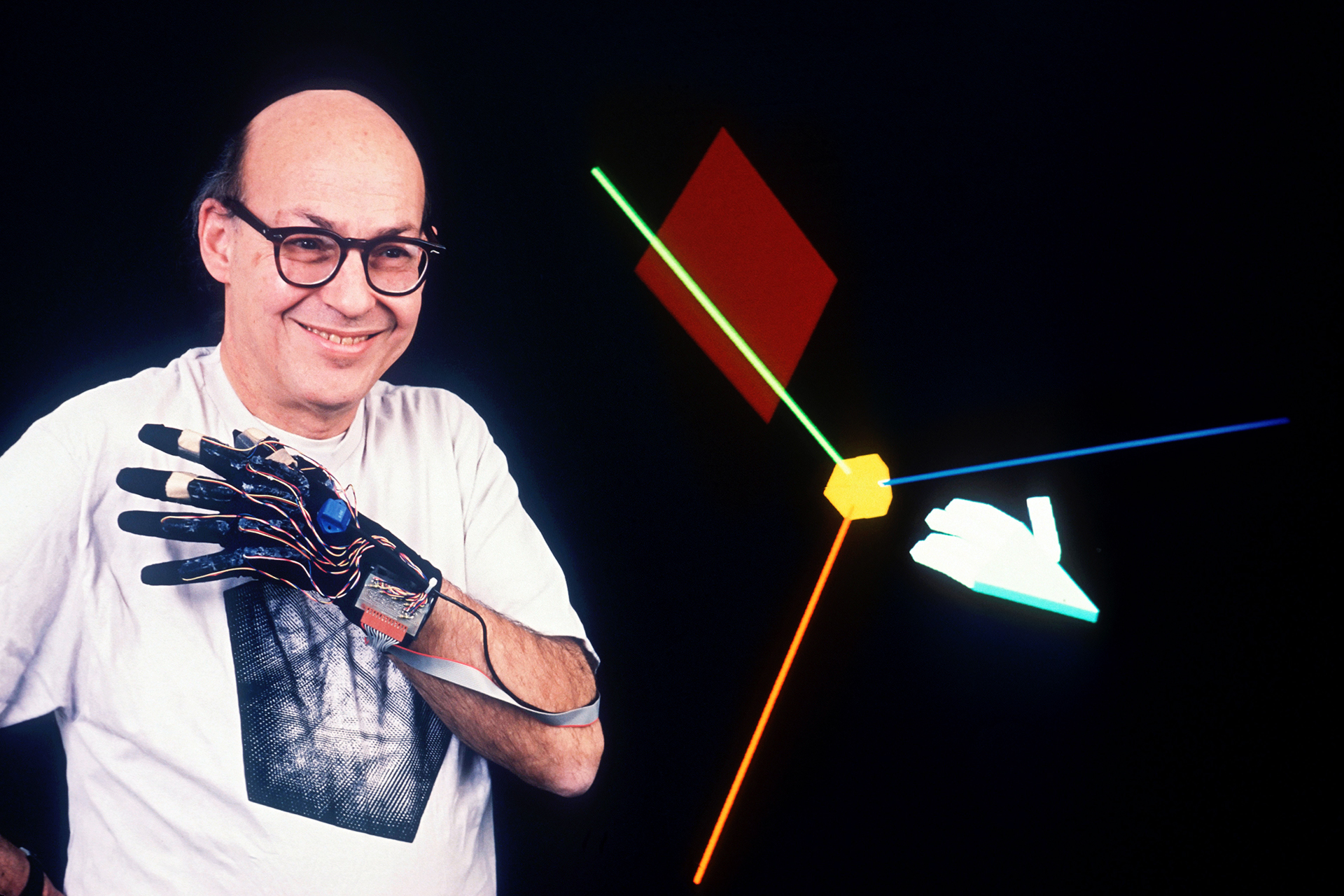
В 1965 году нашей целью было разработать машины, которые могли бы выполнять некоторые вещи, которые большинство детей могут делать, например наливать жидкость в чашки, создавать арки и башни из неупорядоченного набора строительных блоков. [5] Для этого, мы создали различные механические руки и электронные глаза и подключили всё это к нашим компьютерам.
Когда мы построили первого робота, который мог бы оперировать строительными блоками, он делал сотни всевозможных ошибок. [6] Он пытался ставить блоки на верх самих блоков, или пытался ставить два блока в одно и то же место, потому что у него не было никаких адекватных знаний, позволяющих манипулировать физическими объектами! Даже сейчас, никто так и не создал визуальную систему, которая вела бы себя также, как и человеческая визуальная система. Но в конце концов, наша армия студентов разработала программы, которые могли «видеть» расстановку деревянных брусков настолько отчётливо, что компьютер мог заключить, что перед ним находится «горизонтальный блок, который лежит на двух других блоках».

Нам потребовалось несколько лет, чтобы создать робота, под названием Строитель, который мог делать разнообразную работу – например строить арки и башни из блоков, которые он брал из кучи детских кубиков после того как ему показывали решение, на базе компьютера. Мы сталкивались с проблемами на каждом этапе создания этого робота, но иногда дефектные программы начинали работать, когда мы собирали их в последовательность различных уровней исполнения. (Обратите внимание, что они не похожи на Модель Шести, но строятся от конкретным к абстрактным.)
Начини с изображения отдельных точек
Определи их текстуры и края и т.д.
Сгруппируй их в регионы и формы
Соедини их в возможные объекты
Попытайся ассоциировать их со знакомыми вещами
Опиши их пространственные отношения

Однако, эти низкоуровневые стадии достаточно часто не могут найти достаточное количество используемых черт. Посмотрите на фрагмент этой увеличенной картинки, где изображена передняя верхняя часть арки.
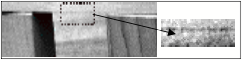
Край блока крайне трудно разглядеть, потому что два смежных региона имеют практически одинаковую текстуру.[7] Мы испытывали сотни различных путей для определения краёв, ни один из методов не работал адекватно в одиночку. В итоге мы получили лучшие результаты когда смогли совместить эти методы. И у нас возникало такое же на каждом из рассматриваемых уровней: ни один из используемых методов не является достаточным, однако сборка методов помогала разрешить различные ситуации. Тем не менее, в конце концов эта пошаговая модель оказалась неудачной, потому что Строитель допускал слишком много ошибок. Мы пришли к выводу, что это было связано с тем, что информация в нашей системе текла от входа к выходу прямиком, и если какая-либо из система совершала ошибку не было ни единого шанса исправить её. Для разрешения этой проблемы мы добавили множество «нисходящих» путей, таким образом заставив информацию течь в обоих направлениях.

Тоже самое касается действий который мы совершаем, потому что когда мы хотим изменить ситуацию в которой мы оказались – то нам необходимо иметь планы относительно наших дальнейших действий, таким образом все эти действия относятся к правилам «То». Например, правило: «Если ты видишь блок, То подними его» приводит к сложному набору действий: перед тем как вы начали поднимать блок, вам необходимо составить план движения вашего плеча, руки и ладони для того чтобы сделать это действия, не затронув при этом другие объекты. Поэтому снова необходимо использовать высокоуровневые процессы, и создание планов должно использоваться для многочисленных уровней обработки информации, итак, наша диаграмма должна выглядеть следующим образом:

Каждый планировщик действий реагирует на конкретный эпизод составляя последовательность Моторных Действий, каждая из которых выполняет конкретный Моторный Навык, например: «достигнуть», «взять», «поднять» и «передвинуть». Каждое Моторное Действие является специалистом в контроле действий определённых мышц и суставов, поэтому то, что в начале казало обычно Реагирующей Машиной, превратилось в большую и сложную систему, в которой каждое «Если» и «То» вовлекает многочисленные шаги и процессы, на каждом этапе передачи сигналов как в нисходящем, так и в восходящем направлении.
В ранние времена наиболее распространённым взглядом было мнение, что наши визуальные системы работают в «восходящем» направлении, сначала различая низкоуровневые особенности объектов, а затем собирают в единое целое отдельные образы и формы, что позволяло им распознавать целые объекты. Однако, в последние годы стало ясно, что наши ожидания на высших уровнях влияют на то, как обрабатывается информация на низших уровнях.
В.С. Рамачандран: [Большинство старых моделей восприятия] основаны на дискредитированной модели «сборной бригады», последовательной иерархической модели, которая приписывает наш эстетический вкус только последнему уровню восприятия. На мой взгляд… на каждом этапе визуальной сегментации до финального «Ага» есть множество мелких этапов. Действительно, сам акт восприятия, группы объектов, может соотносится с разрешением головоломки. Искусство, другими словами, является визуальной прелюдией перед окончательным кульминацией признания ». [8]
Фактически, сейчас мы знаем что визуальные системы в нашем мозге получают огромное количество сигналов от остальной части мозга, а не только от наших глаз.
Ричард Грэгори: «Такой важный вклад накопленного знания в область восприятия согласуется с находкой большого количества нисходящих путей в мозге. Около 80% волокон нервов опускаются на латеральное коленчатое ядро опускается с кортекса, и только 20% нервных волокон идут к этому ядру от сетчатки.»
Предположительно, эти сигналы указывают на то, какие черты предметов мы можем обнаруживать у предметов, которые находятся в зоне нашей видимости. Таким образом, как только вы начинаете думать, что находитесь в кухне, вы с большей долей вероятности будете воспринимать различные объекты как блюдца и чашки.
Всё это говорит о том, что высшие уровни мозга никогда не воспринимают окружающий мир как набор пигментных пятен, вместо этого, ваши ресурсы Описывающие Картину должны представлять вышеописанную арку из блоков в терминах (к примеру) «Горизонтальный блок поверх вертикальных». Без использования подобных высокоуровневых описаний, правила «Если» очень редко бывают практичными.
Соответственно, для того чтобы Строитель мог использовать сенсорные сигналы, ему нужно было знать, что означают эти данные, поэтому мы потом дали представление об используемых объектах Строителю. Затем, предположив, что что-то сделано из прямоугольных блоков, одна из этих программ могла часто «определять» какой блок появлялся в её области видимости, основываясь только на его силуэте! Строитель мог делать подобные вещи благодаря подобным суждениям:

Как только программа определяла некоторые из рёбер фигуры, она начинала представлять ещё больше частей блоков к которым принадлежат эти рёбра, и используя эти знания, программа начинала искать ещё больше необходимых значений, повторяя вышеописанный цикл. На этом этапе программа уже была гораздо лучше исследователей, которые её запрограммировали.[10]
Мы также дали Строителю дополнительные знания о наиболее распространённых «понятий» слов угол и край. Например, если программа находила край, то  она могла предположить что этот край принадлежит какой-то определённой фигуре. Затем программа пыталась найти эту фигуру и определить её оставшиеся края.[11]
она могла предположить что этот край принадлежит какой-то определённой фигуре. Затем программа пыталась найти эту фигуру и определить её оставшиеся края.[11]
Наши низкоуровневые системы рассматривают большое количество фрагментов, но затем ы используем «контекст» для того, чтобы определить, что эти фрагменты означают, а затем и подтверждаем наши догадки используя некоторые процессы промежуточных уровней. Другими словами, мы «распознаём» (re-cognize) вещи путём их «вспоминания» и соотнесения со знакомыми объектами, которые могут соотносится с представленными фрагментами. Но мы до сих пор незнаем достаточно о том, как наши высокоуровневые ожидания влияют на то, как низкоуровневые системы распознают окружающий мир. Например, почему мы не видим, что средняя фигура, представленная ниже, имеет ту же форму, что и её соседи?

В прекрасном обзоре этого вопроса Зенон Пилишин описывает несколько теорий, которые могут описать подобный феномен, однако он приходит к выводу, что нам ещё очень многое предстоит узнать.[12]
За перевод спасибо Станиславу Суханицкому. Кто хочет помочь с переводом — пишите в личку или на почту magisterludi2016@yandex.ru
Chapter 5. LEVELS OF MENTAL ACTIVITIES
Chapter 6. COMMON SENSE
Chapter 7. Thinking.
Chapter 8. Resourcefulness.
Chapter 9. The Self.
Об авторе
Марвин Ли Минский (англ. Marvin Lee Minsky; 9 августа 1927 — 24 января 2016) — американский учёный в области искусственного интеллекта, сооснователь Лаборатории искусственного интеллекта в Массачусетском технологическом институте. [Википедия]
Интересные факты:
- Минский дружил с критиком Харольдом Блумом из Йельского университета (Yale University), который отзывался о нём не иначе как «зловещий Марвин Минский».
- Айзек Азимов описывал Минского как одного из двух людей, которые умнее, чем он сам; вторым, по его мнению, был Карл Саган.
- Марвин — робот с искусственным интеллектом из цикла романов Дугласа Адамса Автостопом по галактике и фильма Автостопом по галактике (фильм).
- Минский имеет контракт на заморозку своего мозга после смерти для того, чтобы его «воскресили» в будущем.
- В честь Минского назван пес главного героя в фильме Трон: Наследие. [Википедия]

#philtech (технологии + филантропия) — это открытые публично описанные технологии, выравнивающие уровень жизни максимально возможного количества людей за счёт создания прозрачных платформ для взаимодействия и доступа к данным и знаниям. И удовлетворяющие принципам филтеха:
1. Открытые и копируемые, а не конкурентно-проприетарные.
2. Построенные на принципах самоорганизации и горизонтального взаимодействия.
3. Устойчивые и перспективо-ориентированные, а не преследующие локальную выгоду.
4. Построенные на [открытых] данных, а не традициях и убеждениях
5. Ненасильственные и неманипуляционные.
6. Инклюзивные, и не работающие на одну группу людей за счёт других.
Акселератор социальных технологических стартапов PhilTech — программа интенсивного развития проектов ранних стадий, направленных на выравнивание доступа к информации, ресурсам и возможностям. Второй поток: март–июнь 2018.
Чат в Telegram
Сообщество людей, развивающих филтех-проекты или просто заинтересованных в теме технологий для социального сектора.
#philtech news
Телеграм-канал с новостями о проектах в идеологии #philtech и ссылками на полезные материалы.
Комментариев нет:
Отправить комментарий