© М. ЖванецкийВ 1985 году в СССР появился новый автомобиль «Москвич-2141».
Планировалось, что этот автомобиль третьей группы малого класса займет потребительскую нишу между массовой «восьмеркой» ВАЗ-2108 второй группы малого класса и престижной «Волгой» ГАЗ-24-10 среднего класса.
Довольно большой, скоростной, комфортабельный (по советским меркам) автомобиль с некоторыми элементами шика (УКВ радиоприемник в штатной комплектации!), мечта советского человека.
Помимо э… ряда причин, выходящих за рамки данной статьи, этому мешало отсутствие достаточно мощного двигателя, а также автоматической коробки передач.
И если проблему с двигателем предполагалось со временем решить переходом с УЗАМ-331.10 и ВАЗ-2106 на новое семейство двигателей АЗЛК-21414, под которые началось строительство нового завода, то с автоматической коробкой передач все обстояло более печально. Строго говоря, автоматической коробкой не мог похвастаться ни один массовый советский автомобиль, включая предел мечтаний советской номенклатуры 24-ю «Волгу».
Однако некоторые задумки все-таки были, и тем, кто интересуется историей советской автомобильной техники добро пожаловать под кат
Идея сделать для «Москвича» автоматическую трансмиссию на основе вариатора возникла еще до официального рождения 41-го «Москвича», вначале в виде дипломного проекта, который делался автором данной статьи (тогда еще студента МАМИ) в НАМИ, а потом в УКЭР АЗЛК также по инициативе автора (и в основном его же руками) сначала «в свободное от основной работы время», а позже и в рамках различных «планов создания перспективной техники» *.
- Необходимо отметить, что помимо рассматриваемой в статье бесступенчатой трансмиссии, разрабатываемой для серийных автомобилей семейства «Москвич-2141», на АЗЛК в рамках проекта «Автомобиль 2000-го года» разрабатывалась еще одна интересная бесступенчатая трансмиссия на базе торового вариатора, но «это совсем другая история», требующая отдельного большого разговора.
На базе такого же вариатора проектировал свою бесступенчатую трансмиссию Volkswagen, а несколько позже фирма LuK, поглотившая PIV создала бесступенчатую трансмиссию Multitronic для AUDI.


Другой, не менее важной причиной было то, что производство бесступенчатой трансмиссии планировалось освоить на уже имеющихся машиностроительных заводах, а металлический ремень Transmatic имеет слишком специфическую конструкцию, требующую организации особого производства.
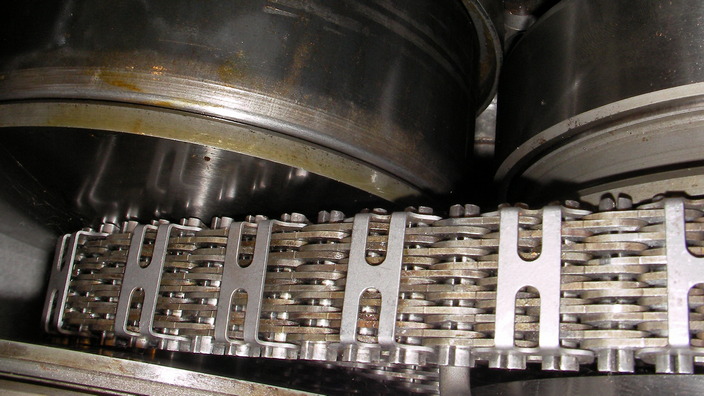
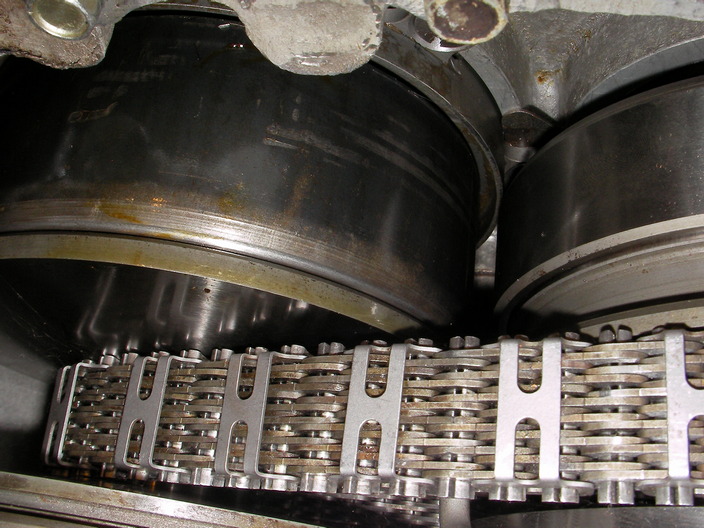
В то же время цепь-ремень PIV конструктивно похожа на обычную хорошо освоенную в производстве зубчатую цепь, широко применяемую в промышленности. Отличия лишь в осях с особой поверхностью торцов, работающих по гладкой конической поверхности шкивов. В данном случае оси сделаны из подшипниковой стали ШХ15, и с точки зрения технологии изготовления весьма похожи на детали подшипников качения.

Несмотря на то, что опытные образцы бесступенчатой трансмиссии были штучным изделием, конструкция сразу проектировалась под серийное производство. Поэтому вся документация изготавливалась «в допуска́х», чтобы сборку можно было осуществлять без подгонки деталей. Картера опытных образцов хоть и отливались «в землю» по деревянным моделям, были спроектированы под литье под давлением. То же можно сказать и о других деталях. Так что хоть это и был опытный образец, но сделанный практически по условиям серийного производства. Это отличает его от большинства самоделок, собираемых «с применением напильника».
Большинство деталей изготавливалось в Экспериментальном цехе УКЭР АЗЛК, а также на других производствах автозавода, значительная часть мехобработки производилась «по конверсии» на НПО «Алмаз»
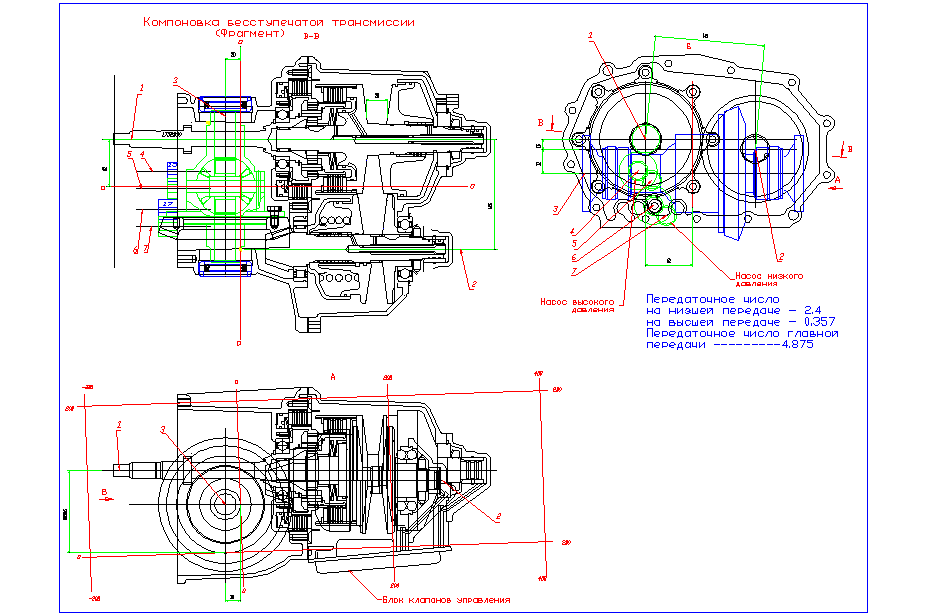
На компоновочной схеме можно увидеть, что вариатор бесступенчатой трансмиссии имеет межосевое расстояние между ведущим и ведомым шкивами 145 мм, максимальное и минимальное передаточные числа 2.4 и 0,357 (1/2.8) соответственно, т.е диапазон передаточных чисел 6,7 (передаточные числа немного несимметричны, чтобы снизить нагрузку на цепь на «низшей передаче»). Относительно небольшое максимальное передаточное число потребовало довольно большого передаточного числа главной передачи 4,875, к счастью гипоидная передача позволяет это сделать.
Поджим шкивов и изменение передаточного числа вариатора производится с помощью гидроцилиндров, расположенных в шкивах.
Поскольку в отличие от зубчатой передачи, направление вращения ведущего и ведомого валов вариатора совпадают, для обеспечения требуемого направления вращения колес автомобиля главная передача получилась «перевернутой» (ведущая шестерня расположена с другой стороны от ведомой). Помимо нужного направления вращения это позволило раздвинуть на необходимое расстояние ведущий и ведомый валы вариатора.
В результате, если сравнить конструкцию данной бесступенчатой трансмиссии, например с «родственным» по конструкции Multitronic-ом, то она получилась намного проще и компактнее.* Задний ход получается с помощью планетарной передачи, переключаемой с помощью «мокрых» многодисковых фрикционов. Они же обеспечивают и трогание автомобиля, так что гидротрансформатор в данном случае отсутствует. В целом конструкция фрикционов и реверса напоминает схему Transmatic, но имеются некоторые отличия, связанные с особенностями компоновки, конструкцией вариатора и системы гидравлического управления вариатором и фрикционами.*
- Небольшое «лирическое отступление».
Если сравнить конструкцию данной бесступенчатой трансмиссии с Multitronic-ом, то наметанный глаз конструктора сможет заметить совпадения некоторых технических решений. В данном случае «все совпадения случайны». Дело в том, что первые открытые публикации конструкции Multitonic появились только в конце 90-х, т.е. примерно через 10 лет после того, как была спроектирована бесступенчатая трансмиссия «Москвич». Конечно проектировался Multitronic раньше, но документация естественно была закрытой. Видимо просто необходимость приспособить громоздкую конструкцию промышленного вариатора PIV к компактной автомобильной трансмиссии вынудили конструкторов двигаться в одинаковом направлении.
- А вот по конструкции Transmatic-а уже была кое-какая доступная информация, так что тут есть кое-какие заимствования, конечно с учетом особенностей, связанной с отличиями конструкции металлического ремня Transmatic и цепи PIV, продольного расположения двигателя и особенностей системы гидравлического управления бесступенчатой трансмиссией.


В 1988 году началось изготовление деталей опытного образца. По плану работа должна была закончиться к 1992 году, но этом этапе работа шла крайне медленно, несколько раз практически останавливалась, поэтому опытный образец был окончательно собран только в 1995 году. К этому мы еще вернемся чуть ниже.В качестве системы управления изначально предполагалась чисто гидравлическая система, с гидравлической «логикой», трубками Пито и т.д.
Но даже такая «простейшая» система управления была нехарактерна для автомобильного производства того времени, и с этим возникали проблемы. Однако в конце 80-х на волне «Перестройки» на базе оборонных предприятий возникло множество кооперативов и малых предприятий, в том числе и научно-производственных, которые с удовольствием брались за подобную работу.
В данном случае за проектирование взялось малое предприятие, образованное на базе ЦИАМ.
Была предложена электро-гидравлическая система, с электронной логикой, для которой удалось использовать серийные клапаны и электронные элементы, применяемые для системы питания и управления авиационных моторов.
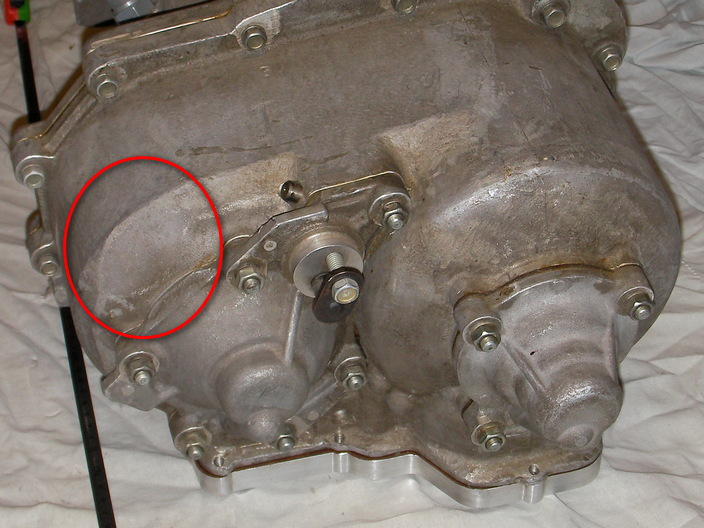
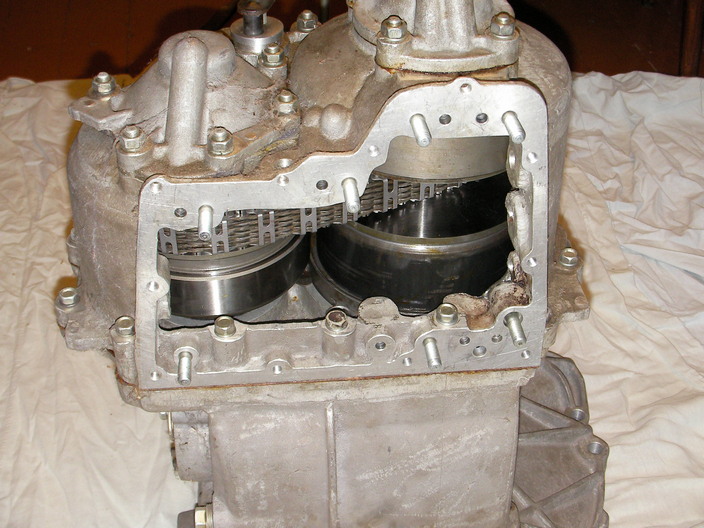
Система управления представляла собой отдельную плиту, устанавливаемую в окно в нижней части трансмиссии.
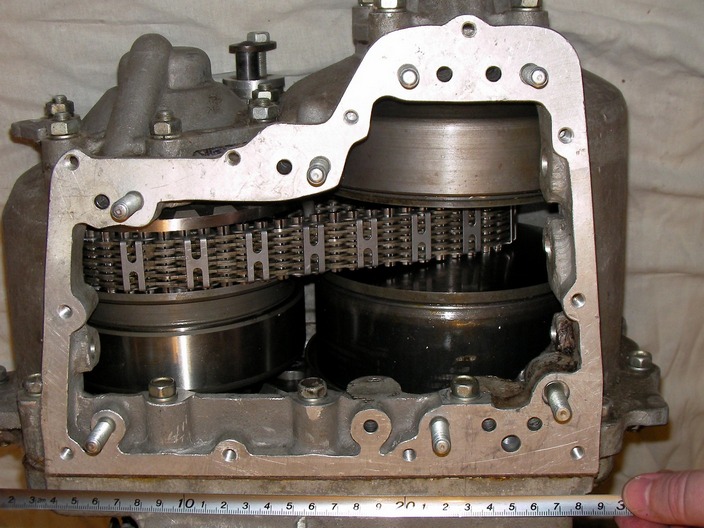
На фотографии видно место для установки плиты управления, с каналами для управления силовой гидравликой вариатора и фрикционов.
Гидравлическая часть системы управления питалась от шестеренчатого насоса, приводимого от двигателя. Была применена система циркуляции масла с полусухим картером, для этого служил второй насос (низкого давления), перекачивающий масло из картера вариатора в картер главной передачи через фильтры грубой и тонкой очистки.
Работа началась в 1988 году, и к 1992 году
К сожалению к этому времени образец трансмиссии еще не был изготовлен, поэтому «свадьба» системы управления с трансмиссией все время откладывалась. В конце концов малое предприятие распалось, и опытный образец системы управления был утерян.Система управления должна управлять трансмиссией в соответствии с заложенным в нее алгоритмом.
Одна из основных задач автомобильной трансмиссии — обеспечить работу двигателя в оптимальном для него режиме в любых условиях движения автомобиля с помощью выбора оптимальной передачи (в случае ступенчатой трансмиссии) или бесступенчатого изменения передаточного числа (в случае вариатора).
В результате двигатель при любой нагрузке должен работать с минимальным для данной нагрузки расходом топлива.*
- Конечно помимо удельного расхода должны учитываться и другие параметры, например, токсичность, износ двигателя, шум, приемистость и т.д.
- В данном случае взята относительная многопараметровая характеристика, на которой обороты и крутящий момент двигателя отображены относительно их максимальных значений.
Можно заметить, что даже при малой мощности двигателя желательно, чтобы его крутящий момент был довольно большим, а обороты минимальными. По мере возрастания мощности обороты двигателя также должны возрастать, а оптимальный крутящий момент при этом меняется очень незначительно. Ну а при максимальной мощности выбирать нечего, тут уж не до экономии, поэтому и нагрузка и обороты максимальные.

В случае автоматической коробки передач водитель задает режим работы педалью газа, а коробка сама подбирает нужную передачу.
Ну а в случае вариатора передаточное число меняется бесступенчато, позволяя двигателю работать на оптимальном режиме для данной нагрузки в зависимости от положения педали газа.
На первый взгляд может показаться, что алгоритм управления бесступенчатой трансмиссией проще, чем ступенчатой автоматической коробкой, однако это не совсем так.
Те, кто ездил на автомобиле 80-х годов выпуска с вариатором (например, Ford Fiesta или Fiat Uno) возможно замечали, что после переезда препятствия (выбоина, ухаб или бордюр) двигатель некоторое время «подвывает» (обороты заметно колеблются). Дело в том, что препятствие вызывает резкое возрастание нагрузки, из-за чего система управления заставляет вариатор увеличить передаточное число, потом нагрузка уменьшается, передаточное число вариатора также уменьшается, в результате возникают колебания.
Еще одной неприятной особенностью этих автомобилей было ощущение «провалившегося сцепления» при резком нажатии педали газа, например при обгоне. Система управления получает сигнал о необходимости существенного увеличения оборотов двигателя, и пытается быстро увеличить передаточное число вариатора для его разгона. В результате столь быстрого разгона двигателя весь его крутящий момент уходит на раскрутку собственного маховика (примерно также, как при резком нажатии педали газа на нейтралке). Конечно через полсекунды-секунду двигатель выйдет на нужный режим, и автомобиль начнет интенсивно разгоняться, но за это время водитель успеет получить отрицательные эмоции.
Если же просто «затупить» систему управления, замедлить ее реакцию, то автомобиль начнет слишком «задумчиво» реагировать на плавную работу педалью газа, что тоже нежелательно.
В принципе этих неприятностей возможно избежать, если алгоритм управления вариатором будет реагировать не только на скорость вращения коленвала, но и на его первую, а желательно и вторую производные (ускорение скорости вращения и ускорение его ускорения).
В этом случае вариатор и двигатель не будут так «нервно» реагировать на резкие изменения нагрузки и интенсивную работу педалью газа, и в то же время достаточно «чутко» отслеживать небольшие колебания нагрузки и малейшие движения педали газа.
Конечно при нынешних цифровых системах управления это легко разрешимая задача, поэтому на современных автомобилях с вариаторами отмеченные выше недостатки практически искоренены.
Однако в конце 80-х годов в трансмиссиях с гидравлической и даже более совершенной электронной логикой это было весьма сложно осуществить.
В рассматриваемой трансмиссии был использован предложенный в конце 50-х годов д.т.н. В.А.Петровым оригинальный алгоритм управления, лишенный этого недостатка.
При этом в качестве «опорного сигнала» для управления передаточным числом вариатора использовались не обороты двигателя, а его крутящий момент, измеренный непосредственно после маховика (в данном случае это важная оговорка!).
Конечно для этого нужно было иметь датчик крутящего момента, но в данном случае он изначально был заложен, чтобы регулировать давление в гидроцилиндрах шкивов в зависимости от того же крутящего момента.
Измерение крутящего момента производилось по углу закрутки достаточно длинного первичного вала трансмиссии (см схему в начале статьи).
Для этого использовалось два датчика Холла на зубчатых венцах около переднего и заднего концов первичного вала, по разнице фаз на которых можно было вычислить крутящий момент. Ну а один из этих датчиков Холла служил и для измерения оборотов двигателя.
На данный алгоритм управления вариатором было оформлено Авторское свидетельство на изобретение.
Помимо этого, на другие технические решения также было получено еще несколько Авторских свидетельств и Патентов на изобретения.К сожалению момент изготовления опытного образца бесступенчатой трансмиссии практически совпал с приходом к власти на АЗЛК генерального директора Рубена Астаряна, при котором началась агония завода. В таких условиях так и не удалось провести нормальные испытания, не говоря уж об освоении производства. Ну а через несколько лет и сам автозавод окончательно стал банкротом.
Впрочем, «это уже совсем другая история», грустная и очень печальная…
P.S. Фотографии в большем разрешении можно посмотреть в моем фотоальбоме
P.P.S.
Эту статью я пытался написать уже очень давно, но в силу некоторых субъективных причин она никак не получалась. В конце концов я понял, что если не опубликую ее сейчас, то не напишу никогда. Прошу прощения за некоторую сумбурность, обычно я пишу легче. Если данная тема вызовет интерес, то возможно будет продолжение.
Комментариев нет:
Отправить комментарий