Поскольку предыдущее моё малое эссе было воспринято в целом позитивно,
хочу поделится некоторыми накопленными в процессе чтения форумов, знаниями, касательно электровелосипедов.

В сией статье хочу поделится тем, какие виды приводов используются в электровело, их плюсы, минусы, и особенности.
Надеюсь, это кому то покажется интересным. Обозревать буду только трехфазные двигатели постоянного тока — ибо остальные не исследовал, да и относительно редки эти остальные
в наше время.
Итак, начнём:
По большому счёту приводные элементы электровелосипедов можно рассортировать в 3 вида:
1. каретный электродвигатель, электродвигатель с центральным расположением.
2. редуктороне мотор-колесо (geared hub motor).
3. моторколесо с прямым приводом ( директ-драйв).
Начнём с номера первого: мид-драйв, центральный
Оно, кстати, довольно популярно в брендовых всяких европейских электровелосипедах.
Находится вблизи каретки ( педалей) велосипеда, через цепной привод, и механизм передачь,
если на велосипеде такой есть, вращает заднее колесо.


Плюсы: если велосипед с передачами — широкий диапазон оптимального применения за счёт этих самых передачь — можно и хорошую тягу на малых оборотах получить, и высокую скорость.
Минусы: цепь и звёзды становятся расходником, если по пути порвёте цепь, или погнёте петух, или ещё как-то сломаете цепную передачу — домой будете возвращатся пешком толкая свой транспорт.
Алсо невозможен полнопривод с использованием одного мотора.
Номер второй: Редукторник, geared
Электродвигатель расположен внутри ступицы колеса, там же расположена зубчатая понижающая планетарная передача, которая даёт электродвигателю вращаться с большими оборотами, чем обод колеса.
Шестерёнки обычно из пластмассы.
Есть механизм передающий момент в системе колесо-мотор только в одном направлении — при тяге от двигателя (фривил, обгонная муфта).
В случае, когда передача идёт в обратном направлении, происходит разьеденение системы, таким образом при накате, либо движении от педалей, электромотор не вращается, и тем самым не затрудняет вращение колеса.
Тут слева — директдрайв, справа — редукторник:

редукторный мотор:


плюсы: Лучшее кпд в широком диапазоне скоростей относительно директдрайва, лучшая тяга на малых скоростях и старте, меньший расход энергии на километр пробега, меньшие размеры и вес, отсутсвие сопротивления движению при езде от педалей.
Минусы: отсутствие возможности использовать рекуперацию, слабое место в виде пластиковых шестеренок, при срезании зубьев каковой, либо порче обгонной муфты в пути, добираться придётся педалируя.
Номер третий: директдрайв
Самая, вроде, надёжная система за счёт минимизации лишних деталей — чистый электродвигатель, ротор сидит на оси и неподвижен относительно вилки,
статор вращается вместе с колесом.




Плюсы: минимум лишних деталей, возможна рекуперация, легкое достижение высоких скоростей.
Минусы: относительно большой диаметр и вес, низкое кпд при малых скоростях.
Теперь про общие вопросы, связанные, в основном таки с моторколёсами, ибо миддрайв меня не интересует, так что я по нему не очень интересовался.
Итак, в целом — редукторное моторколесо более тяговитое и более экономичное.
Директдрайв — более скоростной, так что если хочется ездить на скоростях 40 — 50+, то скорее стоит присматриватся к директдрайвам.
Также у директдрайва посредством контроллера можно реализовать режим рекуперации — перевод электродвигателя в режим генератора с запасанием выработанной энергии обратно в аккумуляторную батарею.
Эффект от подзарядки аккумулятора рекуперацией достаточно мизерный — порядка увеличения на 2-3 процента пробега, плюс ещё там есть ньюансы в виде больших токов зарядки, и того, что заряжать литиумный акб при температурах ниже +5 цельсия — это убивать его ( относится и к мобилам и прочим бытовым девайсам на литий-ионе и литий -полимере, кстати), но зато его можно использовать в качестве тормоза, и таким образом экономить тормозные колодки.
Кстати, в «большом электротранспорте», в виде, к примеру, электропоездов ЭР2Т, рекуперативное торможение точно так и используется — до скорости порядка 25 кмч поезд тормозит чисто введением тяговых электродвигателей в режим генераторов, отдавая выработанную электроэнергию обратно в контактную сеть.
Для экономичного вождения много полезнее минимально пользоватся торможением, и максимально — накатом — то есть видя красный сигнал светофора, к примеру, не переть прямо до него на газу, а метров за 300 закрыть газ, и накатом двигатся, чтобы к приезду к светофору иметь скорость не более 10-15 кмч.
Что ещё: скорость езды.
Один из наиболее частых вопросов новичков — как быстро мой велосипед будет ехать на электроприводе?
Это прямо зависит от четырёх вещей:
1. Обороты холостого хода мотор-колеса при номинальном напряжении:
Нормальный продаван их либо указывает, либо из можно из него выбить.
У моего моторколеса, к примеру, это 310 RPM при 48V. При замере китайским тахометром,
оказалось 305 оборот в минуту при питании от 4 последовательно соединённых свинцовых акб по 12 вольт ( примерно 50 вольт фактически) на вывешенном колесе — приемлемо.
Не забывайте, что это обороты мотор-колеса без нагрузки, это важно!
2. Диаметр обода колеса. Понятно, что чем больше окружность колеса, тем больше будет фактическая скорость при равных оборотах.
Формула для рассчёта: окружность колеса в милиметрах / 1000 * ( обороты мотор-колеса /60) = скорость в метрах в секунду. Для километров в час умножить на 3.6, для получения финальной прогнозируемой скорости — всё это ещё поделить на 1.2, ибо обороты под, даже вполне посильной нагрузкой, будут ниже, чем без нагрузки ( приблизительно на 20 процент, да).
3. Соответствие мощности к сопротивлению движению.
Если у вас расчётная скорость получилась 50 кмч, для достижения и поддержания таковой скорости мотор должен будет развивать мощность порядка киловатта, или 1000 ватт.
если ваш мотор будет развивать мощность в 500 ватт, то из за сопротивления вращению он не сможет достичь своих максимальных оборотов, понятно, и вы будете довольствоватся максимальной скоростью в 37 кмч вместо 50 — при этом мотор ещё будет довольно сильно греться из за перегрузки, если вы на такой скорости будете ездить на до конца выкрученной ручке газа.
4. Напряжение питания.
При покупке моторколеса, к нему указывается номинальное напряжение питания — к примеру, 48 вольт.
Но напрямую такие двигатели никто не питает — они управляются контроллером, который получает от аккумуляторной батареи однофазное постоянное напряжение, и преобразует его в трехфазное «вращающееся», для питания мотор-колеса.
Так вот, не обязательно питать моторколесо контроллером и батареей на указанное напряжение.
Вы можете питать 48-вольтовый мотор батареей и контроллером на 36 вольт.
Или на 24, или на 60 вольт — при этом скорость вращения мотор-колеса на полном газу будет соотвественно 0.75, 0.5, или 1.25 от номинальной.
То есть, вы вполне можете регулировать максимальную скорость в некоторых пределах чисто изменением напряжения аккумуляторной батареи и контроллера.
Есть контроллеры на двойное напряжение — например, на 36/48 вольт, или на 48/60 вольт.
Также важный параметр контроллеров применительно к электродвигателю — это его ампераж, через который может быть установлена максимальная мощность достигаемая мотором, который он питает — например, 36v 17A = ~ 612 watt, 60V 25A =~ 1500w
Дело в том, что указанная на моторколесе «мощность в ваттах» — это скорее рекомендуемая долговременная, при которой он не перегреется, и при которой гарантируется его долгая и счастливая жизнь.
А так-то на 250 ватт мотор можно и 500, и 800 ватт, и даже киловатт подать — понятно, это в долговременной преспективе может не понравится пластиковым шестерёнкам, или фривилу, но считается что двух — трехкратное форсирование большинство моторколёс переносит относительно хорошо.
Впрочем — контроллеры достойны отдельной статейки, по этому в эти дебри сейчас углублятся не будем.
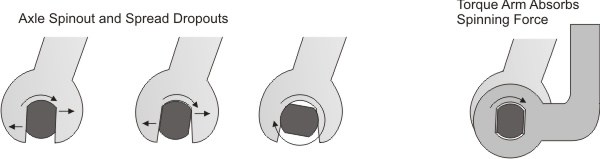
Что ещё важно — усилители дропаутов (torque arm).
В силу того, что рама обычных велосипедов не предназначена на сопротивление оси колёс на скручивание, особенно, в случае алюминиевой вилки / рамы, крайне рекомендуется принимать меры против проворачивания оси мотор-колеса.
Дело в том, что согласно чему-то-там любое действие рождает противодействие.
Мотор-колесо крутит обод, опираясь на ось, то есть ось колеса у неё как точка опоры, которую она при этом пытается провернуть в другую сторону.
Если пазы вилки этот момент не выдерживают, они ломаются, как следствие — колесо уезжает отдельно, велосипед на скорости перьями вилки втыкается в асфальт. К чему это приводит — надеюсь, обьяснять не надо, поломки костей и даже морг в результате — вполне вероятны.


Удачи в электрификации, друзья!
ПС что-то глаза у меня тут недобрые — впервые сам это, на большой картинке, заметил…
но вообще то я белый и пушистый, если рано с утра на работу не надо ехать...:D

Комментариев нет:
Отправить комментарий