
Специализация
Лаборатория робототехники относится к старейшей кафедре Университета ИТМО, которая называется «Системы управления и информатика». Она появилась в 1945 году. Сама лаборатория была запущена в 1955 году — тогда в ней занимались вопросами автоматизации измерений и расчетами параметров надводных судов. Позже спектр направлений был расширен: добавили кибернетику, САПР, а также робототехнику.
Сегодня в лаборатории занимаются совершенствованием промышленных роботов. Сотрудники решают вопросы, связанные со взаимодействием человека и машины — разрабатывают безопасные алгоритмы управления с контролем силы робота, а также работают над коллаборативными роботами, которые могут выполнять задачи бок о бок с людьми.
Также в лаборатории разрабатывают альтернативные методы дистанционного управления группами роботов и создают программные алгоритмы, которые можно перенастраивать на выполнение новых задач в режиме онлайн.
Проекты
Ряд робототехнических систем лаборатории приобретен у крупных компаний и предназначен для исследовательских или промышленных целей. Часть оборудования изготовлена сотрудниками в рамках научно-исследовательских и опытно-конструкторских работ.
Из последних можно выделить робототехническую платформу Стюарта с двумя степенями свободы. Академическая установка предназначена для апробации алгоритмов управления по удержанию шара в центре площадки (на систему в действии можно посмотреть в этом видео).
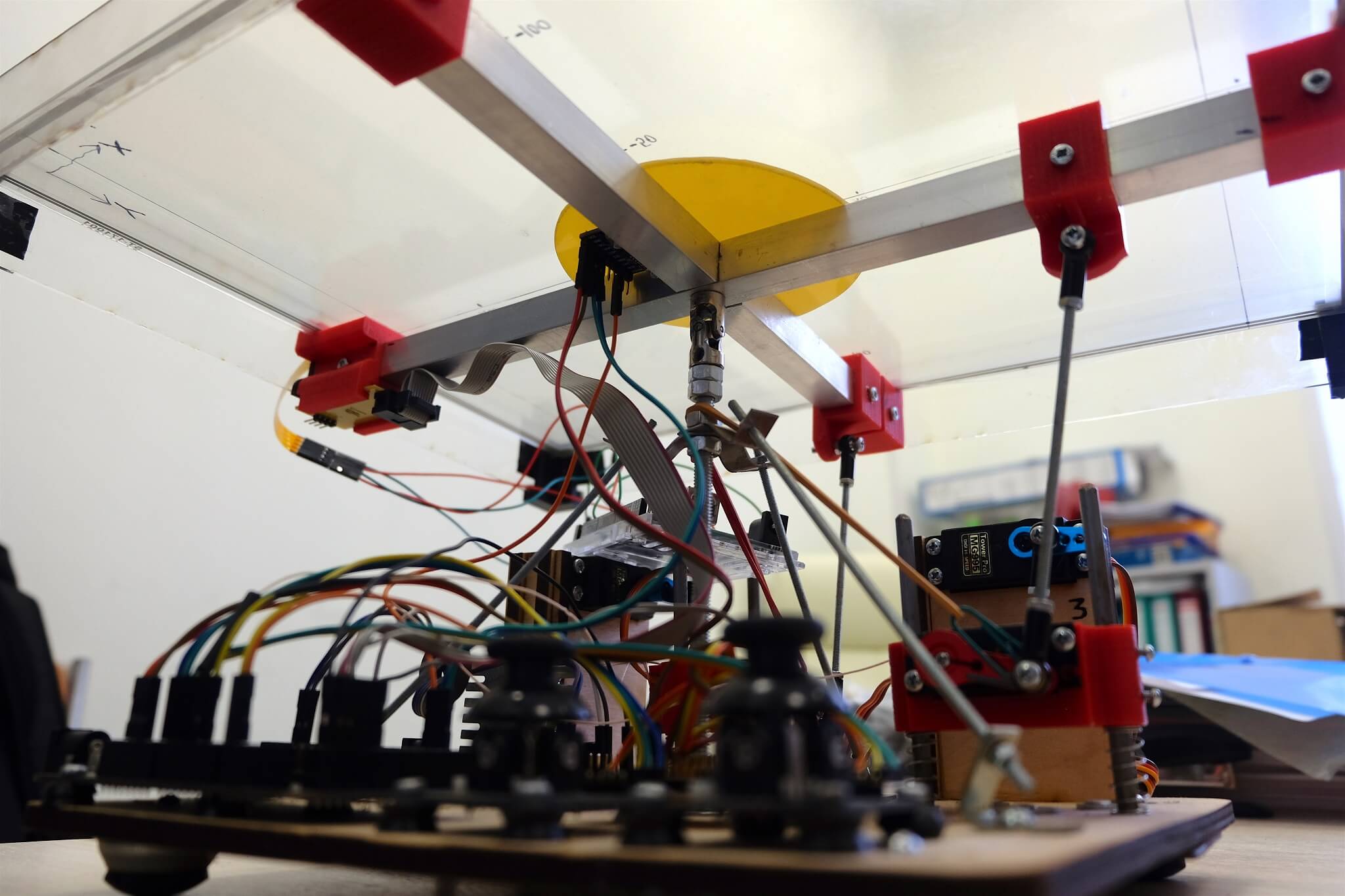
Робототехнический комплекс состоит из прямоугольной платформы с резистивной сенсорной подложкой, определяющей координаты шара. К ней с помощью шарнирного соединения прикреплены валы приводов. Эти приводы меняют угол наклона платформы согласно управляющим сигналам, поступающим с компьютера через USB, и не дают шару укатиться.
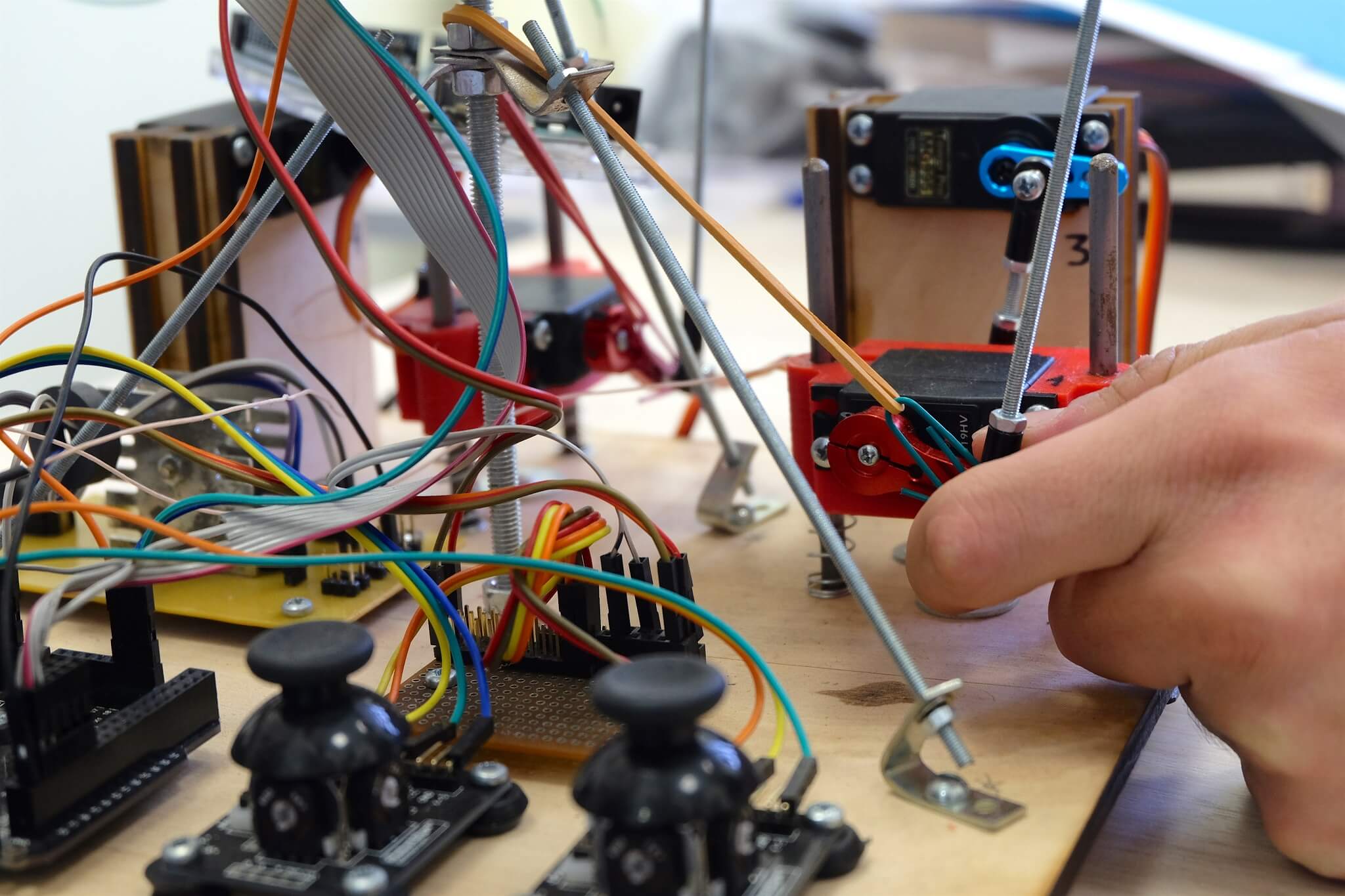
Комплекс имеет дополнительные сервоприводы, которые отвечают за компенсацию возмущений. Для работы этих приводов сотрудники лаборатории разработали специальные алгоритмы, «сглаживающие» разного рода помехи, например вибрации или ветер.
Кроме того, в парке роботов лаборатории имеется исследовательская установка KUKA youBot, представляющая из себя пятизвенный робот-манипулятор, закрепленный на мобильной платформе со всенаправленными колесами.

На роботе KUKA youBot испытывались алгоритмы адаптивного управления для слежения за подвижной целью. Они используют систему технического зрения на базе цифровой камеры и процедуры обработки видеоизображения. Основу этого проекта составляют исследования в области адаптивного управления нелинейными системами, проводимые сотрудниками лаборатории.
Алгоритмы управления используются для компенсации внешних воздействий, действующих на звенья робота. В результате машина получает возможность удерживать рабочий инструмент в фиксированной точке пространства и устойчиво перемещать его вдоль заданной траектории.
Примером проекта, реализованного на базе робота KUKA youBot, является бездатчиковое силомоментное очувствление. Совместно с британской компанией TRA Robotics мы разработали алгоритм, позволяющий оценивать силу взаимодействия рабочего инструмента с окружающей средой без дорогостоящих силомоментных датчиков. Это позволило роботу выполнять более сложные операции, не прибегая к помощи внешних систем.

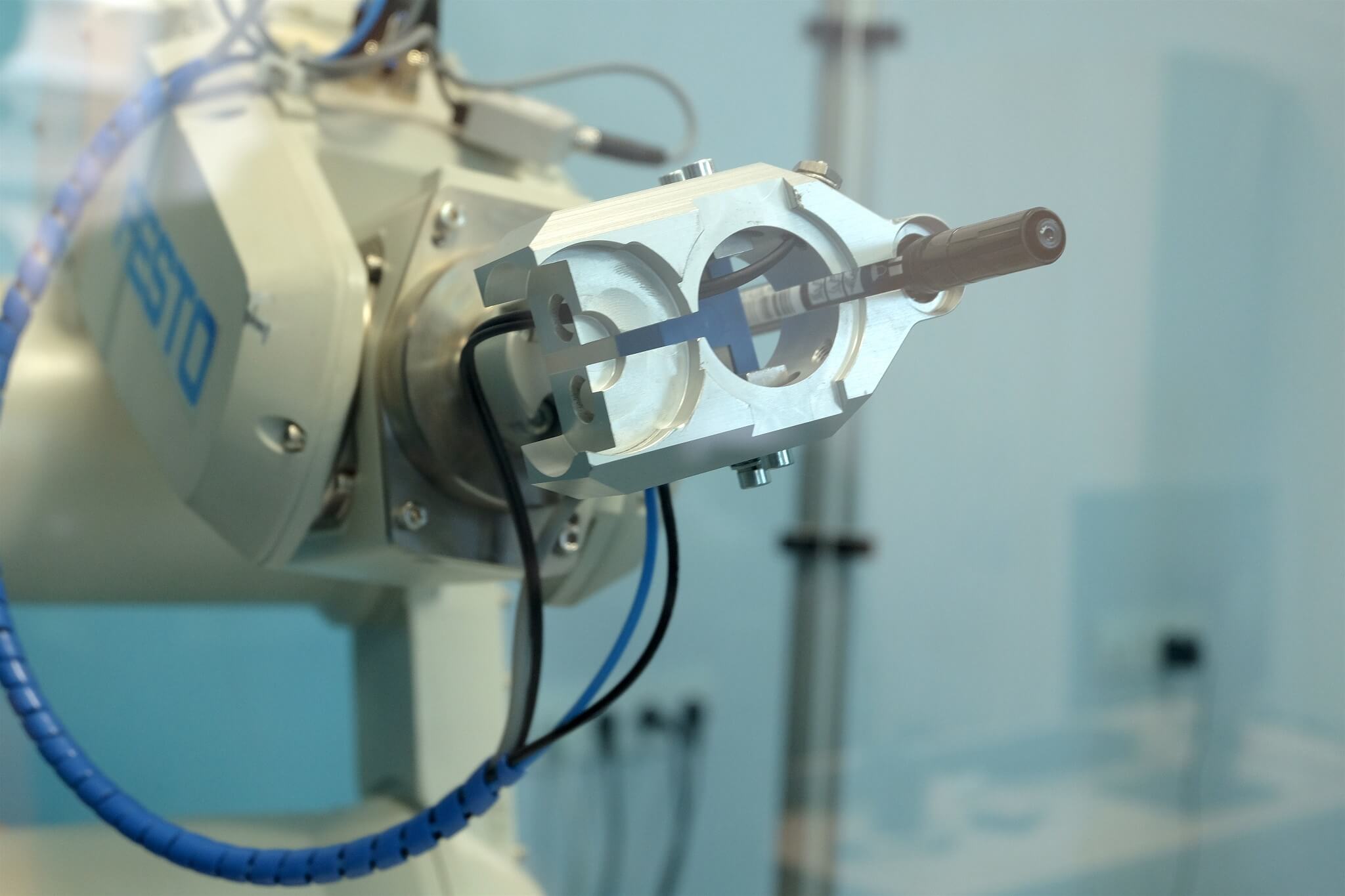
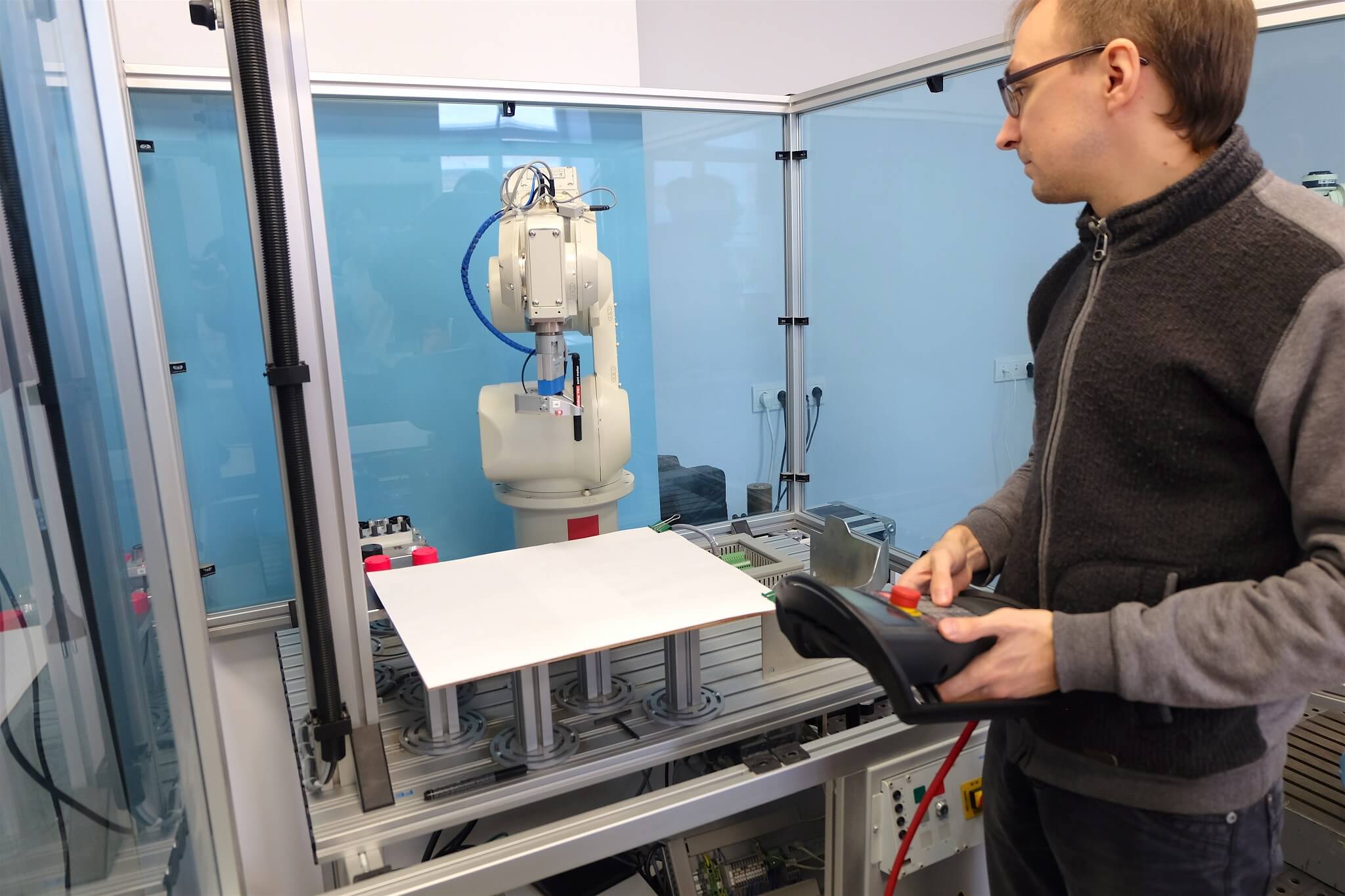
Другим примером робототехнической установки в лаборатории является ячейка FESTO Robot Vision Cell. Этот комплекс используется для имитации технологических операций на производстве, например сварки. Для реализации такого сценария ставится задача планирования движения: имитационный сварочный инструмент обходит по контуру металлической детали.
Кроме того, ячейка оборудована системой технического зрения и способна решать задачи сортировки деталей по цвету или форме.
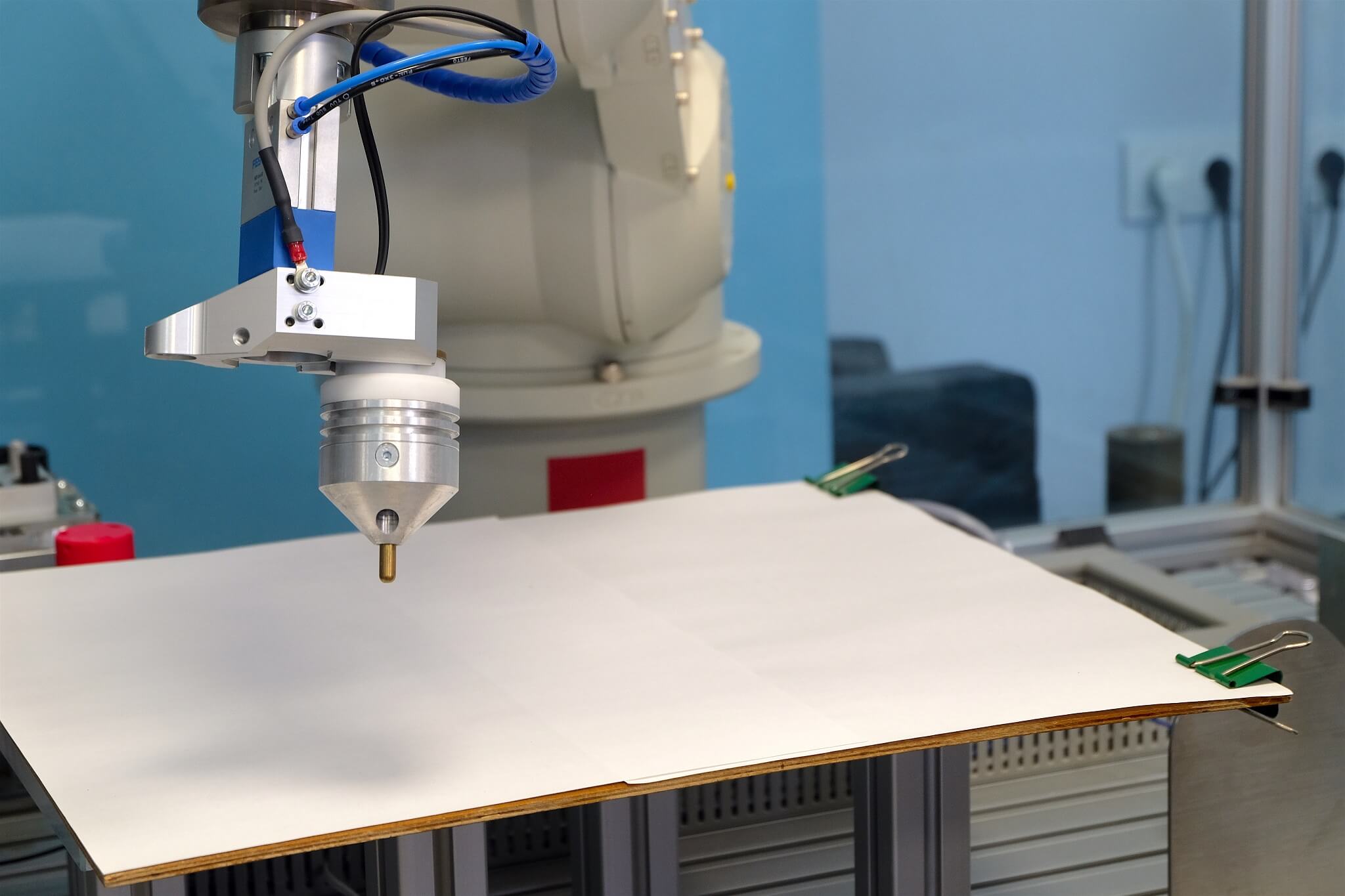
Проект, выполненный на базе робототехнической ячейки FESTO Robot Vision Cell с промышленным роботом Mitsubishi RV-3SDB, решает задачи планирования движений.
Он помогает упростить процесс взаимодействия оператора с контроллером робота при программировании сложных траекторий. Идея заключается в автоматическом программировании движений инструмента робота с помощью контуров, изображенных на растровом рисунке. Достаточно загрузить в систему файл, а алгоритм самостоятельно расставит необходимые опорные точки и составит код программы.
На практике полученное решение можно применить для нанесения гравировки или рисования.
У нас на канале есть видео, в котором наш «робот-художник» изобразил портрет А. С. Пушкина. Также технологию можно использовать для сварки деталей сложной формы. По сути, это робототехнический комплекс, решающий промышленные задачи в лабораторных условиях.
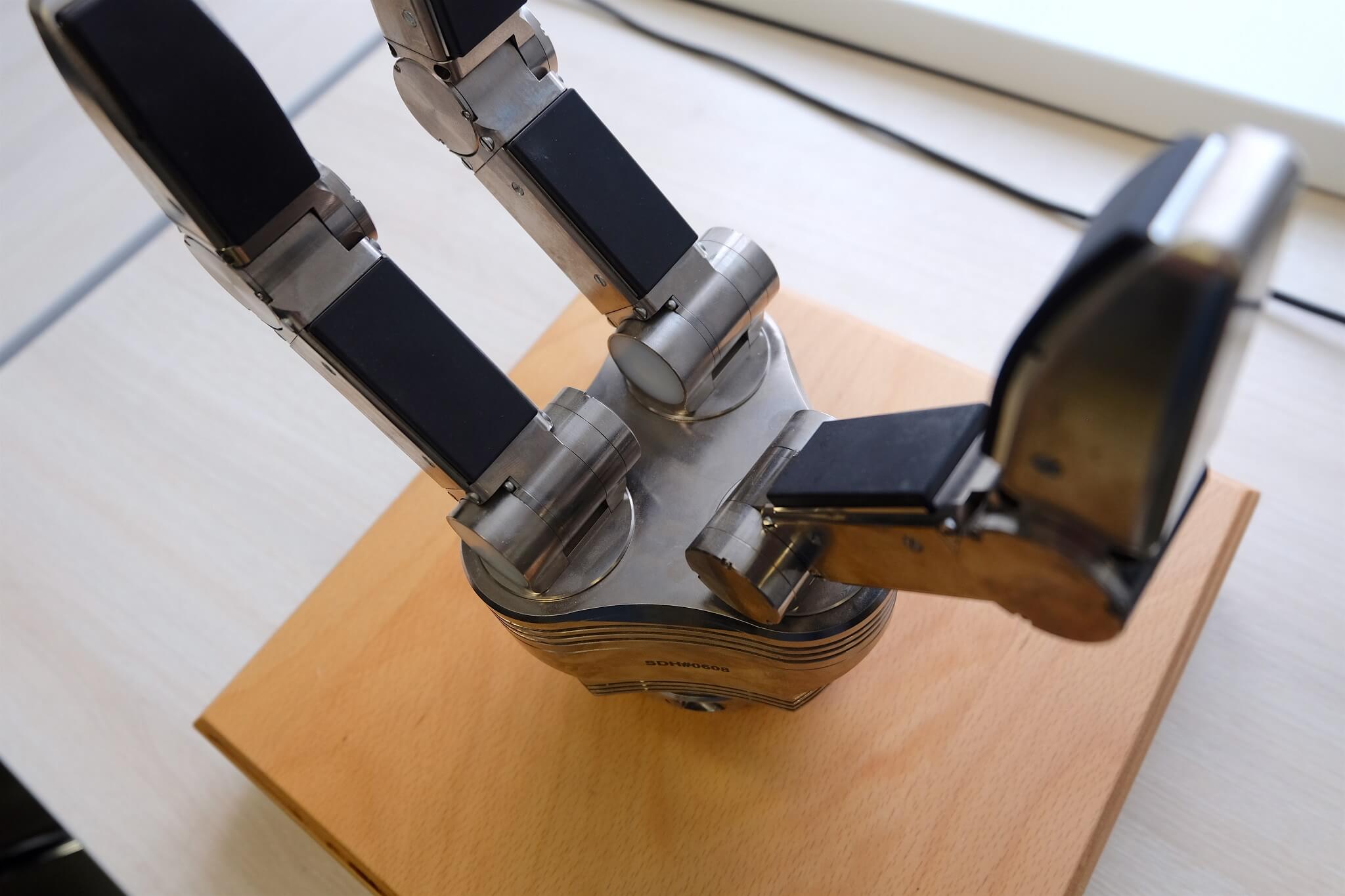
В лаборатории также имеется трехпалое захватное устройство, оснащенное датчиками давления, расположенными на внутренней поверхности пальцев.
Такое устройство позволяет выполнять манипулирование хрупкими объектами, когда важно точно контролировать силу захвата во избежание повреждения.
В лаборатории имеется роботизированная модель надводного судна, которая предназначена для проведения испытаний систем динамического позиционирования.
Модель оснащена несколькими исполнительными приводами, а также аппаратным обеспечением радиосвязи для передачи управляющих сигналов.

В помещении лаборатории есть бассейн, на котором проверяется работоспособность алгоритмов управления по удержанию положения малой модели надводного судна с компенсацией продольных и поперечных смещений.
В настоящее время планируется организация крупного бассейна для проведения масштабных испытаний с усложненными сценариями.

Работа с партнерами и планы
Один из наших партнеров — британская компания TRA Robotics. Вместе мы работаем над совершенствованием алгоритмов управления промышленными роботами для предприятия цифрового производства. На таком предприятии весь производственный цикл: от разработки до изготовления промышленной продукции, будут выполнять роботы и системы ИИ.
Среди других партнеров — концерн «Электроприбор», совместно с которым мы разрабатываем мехатронные и робототехнические системы. Наши студенты помогают сотрудникам концерна в области приборостроения, разработки программного обеспечения и производственных задач.
Еще мы сотрудничаем с General Motors, развиваем робототехнику вместе с InfoWatch. Также сотрудники лаборатории плотно взаимодействуют с компанией АО «Навис», которая реализует проекты по разработке систем динамического позиционирования для надводных судов.
На базе Университета ИТМО работает Лаборатория молодежной робототехники, где школьники готовятся к состязаниям мирового уровня. К примеру, в 2017 году наша сборная выиграла World Robot Olympiad в Коста-Рике, а летом 2018 наши воспитанники взяли два призовых места на Всероссийской олимпиаде школьников.
Мы планируем привлекать больше отраслевых партнеров и воспитывать молодое поколение российских ученых. Возможно, именно они разработают таких роботов, которые органично дополнят мир людей и будут выполнять больше рутинных и опасных задач на предприятиях.
Комментариев нет:
Отправить комментарий