Статья направлена на прокачку навыков процедурной обработки мешей в Unity. Мы расскажем об операциях преобразования и генерации частей меша.
Наш джентльменский набор для процедурного редактирования 3D-моделей включает три базовые операции: триангуляцию, движение точек, выдавливание. Подробно поговорим о последних двух. Сначала рассмотрим простейшие операции движения — перемещение вершин, поворот и масштабирование ребер и треугольников. Затем разберемся с одним из способов генерации новой геометрии — операцией выдавливания (Extrude).
В предыдущей публикации мы описывали свою структуру для удобной работы с данными 3D-моделей.
public static class CustomMeshPool
{
private static List<CustomMesh> Pool;
private static int pointer;
public static CustomMesh GetMesh(int id)
{
return Pool[id];
}
public static int Push(CustomMesh customMesh)
{
if (Pool == null)
Pool = new List<CustomMesh>();
pointer = GetAvailableIndex();
if (pointer < Pool.Count)
Pool[pointer] = customMesh;
else
Pool.Add(customMesh);
return pointer;
}
public static bool Remove(int index)
{
if (Pool == null)
return false;
var b = Pool[index] == null;
Pool[index] = null;
return b;
}
public static int GetAvailableIndex()
{
if (Pool == null)
return 0;
var availableIndex = Pool.FindIndex(mesh => mesh == null);
return availableIndex != -1 ? availableIndex : Pool.Count;
}
public static void Flush()
{
if (Pool != null)
Pool.Clear();
}
}
public class CustomMesh
{
public int Id;
public Triangle[] Triangles;
public Vector3[] vertices;
public Vector3[] normals;
public Vector2[] uv0, uv2;
public Color[] colors;
public CustomMesh(Vector3[] vertices, int[] triangles, Vector3[] normals, Vector2[] uv0, Vector2[] uv2,
Color[] colors)
{
this.vertices = vertices;
this.normals = normals;
if (normals != null)
for (var i = 0; i < this.normals.Length; i++)
{
this.normals[i] = this.normals[i].normalized;
}
this.uv0 = uv0;
this.uv2 = uv2;
this.colors = colors;
var ptr = CustomMeshPool.GetAvailableIndex();
CustomMeshPool.Push(this);
Id = ptr;
Triangles = new Triangle[triangles.Length / 3];
Triangles = Triangles
.AsParallel()
.Select((t, i) => new Triangle(ptr, i, triangles[i * 3], triangles[i * 3 + 1], triangles[i * 3 + 2]))
.ToArray();
}
}
public struct Triangle
{
private int _index;
public int Index
{
get { return _index; }
set
{
_index = value;
if (_edges != null)
{
_edges[0].TriangleIndex = value;
_edges[1].TriangleIndex = value;
_edges[2].TriangleIndex = value;
}
}
}
private int _meshId;
public int MeshId
{
get { return _meshId; }
internal set { _meshId = value; }
}
private Edge[] _edges;
public Edge[] Edges
{
get { return _edges; }
set
{
if (value.Length == 3)
{
_edges = value;
for (var i = 0; i < 3; i++)
{
_edges[i].TriangleIndex = _index;
}
}
else
throw new IndexOutOfRangeException();
}
}
public Vertex V0
{
get { return Edges[0].v0; }
set
{
if (value.MeshId != MeshId)
throw new Exception("Not the same mesh");
Edges[0].v0 = value;
Edges[2].v1 = value;
}
}
public Vertex V1
{
get { return Edges[1].v0; }
set
{
if (value.MeshId != MeshId)
throw new Exception("Not the same mesh");
Edges[1].v0 = value;
Edges[0].v1 = value;
}
}
public Vertex V2
{
get { return Edges[2].v0; }
set
{
if (value.MeshId != MeshId)
throw new Exception("Not the same mesh");
Edges[2].v0 = value;
Edges[1].v1 = value;
}
}
public Triangle(int meshId, int index, int v0, int v1, int v2)
{
_index = index;
_meshId = meshId;
var edges = new Edge[3];
edges[0] = new Edge(meshId, index, v0, v1);
edges[1] = new Edge(meshId, index, v1, v2);
edges[2] = new Edge(meshId, index, v2, v0);
_edges = edges;
}
}
public struct Edge
{
public Vertex v0;
public Vertex v1;
private int _meshId;
public int MeshId
{
get { return _meshId; }
internal set { _meshId = value; }
}
private int _triangleIndex;
public int TriangleIndex
{
get { return _triangleIndex; }
internal set { _triangleIndex = value; }
}
public Edge(int meshId, int triangleIndex, int v0Index, int v1Index)
{
_meshId = meshId;
_triangleIndex = triangleIndex;
v0 = new Vertex()
{
MeshId = meshId,
Index = v0Index
};
v1 = new Vertex()
{
MeshId = meshId,
Index = v1Index
};
}
}
public struct Vertex
{
public int Index;
private int _meshId;
public int MeshId
{
get { return _meshId; }
internal set { _meshId = value; }
}
public Vector3 position
{
get { return CustomMeshPool.GetMesh(_meshId).vertices[Index]; }
set { CustomMeshPool.GetMesh(_meshId).vertices[Index] = value; }
}
public Vector3 normal
{
get { return CustomMeshPool.GetMesh(_meshId).normals[Index]; }
set { CustomMeshPool.GetMesh(_meshId).normals[Index] = value; }
}
public Vector2 uv0
{
get { return CustomMeshPool.GetMesh(_meshId).uv0[Index]; }
set { CustomMeshPool.GetMesh(_meshId).uv0[Index] = value; }
}
public Vector2 uv2
{
get { return CustomMeshPool.GetMesh(_meshId).uv2[Index]; }
set { CustomMeshPool.GetMesh(_meshId).uv2[Index] = value; }
}
public Color color
{
get { return CustomMeshPool.GetMesh(_meshId).colors[Index]; }
set { CustomMeshPool.GetMesh(_meshId).colors[Index] = value; }
}
}
Как можно заметить, здесь используется PLINQ. Это обусловлено тем, что алгоритмы вычислительной геометрии часто можно оптимизировать за счет многопоточности.
Конечно, во время выполнения LINQ-конструкций мусора создается больше, чем при выполнении «ручного» кода. Однако этот недостаток в значительной степени компенсируется лаконичностью таких конструкций, а также наличием в PLINQ встроенных средств управления ресурсами. Кроме того, переход между однопоточной и многопоточной реализацией осуществляется с помощью всего лишь одной команды, что сильно облегчает процесс отладки.
Кручу, верчу, запутать хочу
Приступим к операциям движения. В перемещении вершин ничего сложного нет. Только нужно не забывать о совпадающих вершинах: если требуется, их положение тоже должно меняться.
Алгоритм реализован через добавление вектора движения к позиции вершины. Смещение при этом происходит относительно начала координат модели (pivot). Стоит отметить, что положение полигонов при таких трансформациях может меняться, а нормали их вершин — нет. Однако для упрощения изложения мы не будем рассматривать этот нюанс.
В CAD-средствах есть функция перерасчета нормалей, которую обычно вызывают уже после применения требуемых трансформаций. Существуют разные способы выполнения такого перерасчета. Наиболее распространенный вычисляет нормаль к плоскости каждого треугольника, а затем каждой вершине присваивает нормаль как среднее от нормалей треугольников, которым эта вершина принадлежит.
В целом здесь нет веских причин усложнять код и применять матрицу трансформации. Результат добавления вектора движения к позиции вершины соответствует интуитивному представлению о ее перемещении.
 |
 |
public struct Vertex
{
...
public void Translate(Vector3 movement, bool withCoincident = false)
{
var newPosition = position + movement;
if (withCoincident)
{
var vertices = CustomMeshPool.GetMesh(_meshId).vertices;
var mask = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(position);
for (int i = 0; i < vertices.Length; i++)
if (mask[i])
vertices[i] = newPosition;
}
else
{
position = newPosition;
}
}
}
public class CustomMesh
{
…
public bool[] GetVerticesInPosition(Vector3 position)
{
bool[] buffer = new bool[vertices.Length];
for (int i = 0; i < buffer.Length; i++)
{
buffer[i] = Mathf.Abs(position.x - vertices[i].x) < Mathf.Epsilon &&
Mathf.Abs(position.y - vertices[i].y) < Mathf.Epsilon &&
Mathf.Abs(position.z - vertices[i].z) < Mathf.Epsilon;
}
return buffer;
}
}
Перемещение ребер и треугольников реализовано так же — добавлением вектора смещения.
public struct Edge
{
…
public void Translate(Vector3 movement, bool withCoincident = false)
{
if (withCoincident)
{
var vertices = CustomMeshPool.GetMesh(MeshId).vertices;
var newV0Position = v0.position + movement;
var newV1Position = v1.position + movement;
var maskV0 = CustomMeshPool.GetMesh(MeshId).GetVerticesInPosition(v0.position);
var maskV1 = CustomMeshPool.GetMesh(MeshId).GetVerticesInPosition(v1.position);
for (int i = 0; i < vertices.Length; i++)
{
if (maskV0[i])
vertices[i] = newV0Position;
else if (maskV1[i])
vertices[i] = newV1Position;
}
}
else
{
v0.Translate(movement);
v1.Translate(movement);
}
}
}
public struct Triangle
{
…
public void Translate(Vector3 movement, bool withCoincident = false)
{
if (withCoincident)
{
var vertices = CustomMeshPool.GetMesh(_meshId).vertices;
var newV0Position = V0.position + movement;
var newV1Position = V1.position + movement;
var newV2Position = V2.position + movement;
var maskV0 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V0.position);
var maskV1 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V1.position);
var maskV2 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V2.position);
for (int i = 0; i < vertices.Length; i++)
{
if (maskV0[i])
vertices[i] = newV0Position;
else if (maskV1[i])
vertices[i] = newV1Position;
else if (maskV2[i])
vertices[i] = newV2Position;
}
}
else
{
V0.Translate(movement);
V1.Translate(movement);
V2.Translate(movement);
}
}
}
А вот вращать и масштабировать удобнее при помощи матрицы преобразования. Результат выполнения этих операций относительно начала координат модели скорее всего окажется не таким, каким вы ожидали или хотели его увидеть. За опорную точку вращения и масштабирования обычно берется середина объекта — как наиболее понятная для человеков.
public struct Edge
{
…
public void Rotate(Quaternion rotation, bool withCoincident = false)
{
var pivot = (v0.position + v1.position) * 0.5f;
var matrix = Matrix4x4.TRS(pivot, rotation, Vector3.one);
var newV0Position = matrix.MultiplyPoint(v0.position - pivot);
var newV1Position = matrix.MultiplyPoint(v1.position - pivot);
if (withCoincident)
{
var vertices = CustomMeshPool.GetMesh(MeshId).vertices;
var maskV0 = CustomMeshPool.GetMesh(MeshId).GetVerticesInPosition(v0.position);
var maskV1 = CustomMeshPool.GetMesh(MeshId).GetVerticesInPosition(v1.position);
for (int i = 0; i < vertices.Length; i++)
{
if (maskV0[i])
vertices[i] = newV0Position;
else if (maskV1[i])
vertices[i] = newV1Position;
}
}
else
{
v0.position = newV0Position;
v1.position = newV1Position;
}
}
public void Scale(Vector3 scale, bool withCoincident = false)
{
var pivot = (v0.position + v1.position) * 0.5f;
var matrix = Matrix4x4.TRS(pivot, Quaternion.identity, scale);
var newV0Position = matrix.MultiplyPoint(v0.position - pivot);
var newV1Position = matrix.MultiplyPoint(v1.position - pivot);
if (withCoincident)
{
var vertices = CustomMeshPool.GetMesh(MeshId).vertices;
var maskV0 = CustomMeshPool.GetMesh(MeshId).GetVerticesInPosition(v0.position);
var maskV1 = CustomMeshPool.GetMesh(MeshId).GetVerticesInPosition(v1.position);
for (int i = 0; i < vertices.Length; i++)
{
if (maskV0[i])
vertices[i] = newV0Position;
else if (maskV1[i])
vertices[i] = newV1Position;
}
}
else
{
v0.position = newV0Position;
v1.position = newV1Position;
}
}
}
public struct Triangle
{
…
public void Rotate(Quaternion rotation, bool withCoincident = false)
{
var pivot = (V0.position + V1.position + V2.position) / 3;
var matrix = Matrix4x4.TRS(Vector3.zero, rotation, Vector3.one);
var newV0Position = matrix.MultiplyPoint(V0.position - pivot) + pivot;
var newV1Position = matrix.MultiplyPoint(V1.position - pivot) + pivot;
var newV2Position = matrix.MultiplyPoint(V2.position - pivot) + pivot;
if (withCoincident)
{
var vertices = CustomMeshPool.GetMesh(_meshId).vertices;
var maskV0 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V0.position);
var maskV1 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V1.position);
var maskV2 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V2.position);
for (int i = 0; i < vertices.Length; i++)
{
if (maskV0[i])
vertices[i] = newV0Position;
else if (maskV1[i])
vertices[i] = newV1Position;
else if (maskV2[i])
vertices[i] = newV2Position;
}
}
else
{
Edges[0].v0.position = newV0Position;
Edges[1].v0.position = newV1Position;
Edges[2].v0.position = newV2Position;
}
Edges[0].v0.normal = matrix.MultiplyPoint(V0.normal);
Edges[1].v0.normal = matrix.MultiplyPoint(V1.normal);
Edges[2].v0.normal = matrix.MultiplyPoint(V2.normal);
}
public void Scale(Vector3 scale, bool withCoincident = false)
{
var pivot =
(V0.position + V1.position + V2.position) / 3;
var matrix = Matrix4x4.TRS(pivot, Quaternion.identity, scale);
var newV0Position = matrix.MultiplyPoint(V0.position - pivot);
var newV1Position = matrix.MultiplyPoint(V1.position - pivot);
var newV2Position = matrix.MultiplyPoint(V2.position - pivot);
if (withCoincident)
{
var vertices = CustomMeshPool.GetMesh(_meshId).vertices;
var maskV0 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V0.position);
var maskV1 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V1.position);
var maskV2 = CustomMeshPool.GetMesh(_meshId).GetVerticesInPosition(V2.position);
for (int i = 0; i < vertices.Length; i++)
{
if (maskV0[i])
vertices[i] = newV0Position;
else if (maskV1[i])
vertices[i] = newV1Position;
else if (maskV2[i])
vertices[i] = newV2Position;
}
}
else
{
Edges[0].v0.position = newV0Position;
Edges[1].v0.position = newV1Position;
Edges[2].v0.position = newV2Position;
}
}
}
Роем себе аккуратную ямку
В 3D-моделировании часто применяется операция выдавливания (Extrude). Для ее выполнения должен быть известен вектор движения (смещения) и набор полигонов. Процесс выдавливания можно декомпозировать на два действия:
1. Смещение полигонов на заданный вектор движения (offset). При этом необходимо дублировать разделяемые граничными полигонами вершины, чтобы не нарушать положение тех элементов, которые не относятся к смещаемой части. Иначе говоря, нужно оторвать и передвинуть выбранный кусок. Если этот шаг выполнить первым, то модель, вероятно, развалится на части, которые придется соединять в будущем.
2. Добавление новой геометрии между границей смещенной части и границей, которая образовалась при выдавливании. Просвет между основной и сдвинутой частями модели заполняется полигонами, образующими стенку.
В реализации удобнее сначала выполнять построение стенки, поскольку до сдвига мы имеем исходное положение ребер на границе и можем использовать эти данные сразу. В противном случае пришлось бы либо инвертировать направление вектора сдвига, либо сохранять часть информации о начальном состоянии меша.
Модель и ее части, с которыми мы работаем, складываются из множеств попарно соседних полигонов (треугольников). Назовем каждое такое множество кластером.
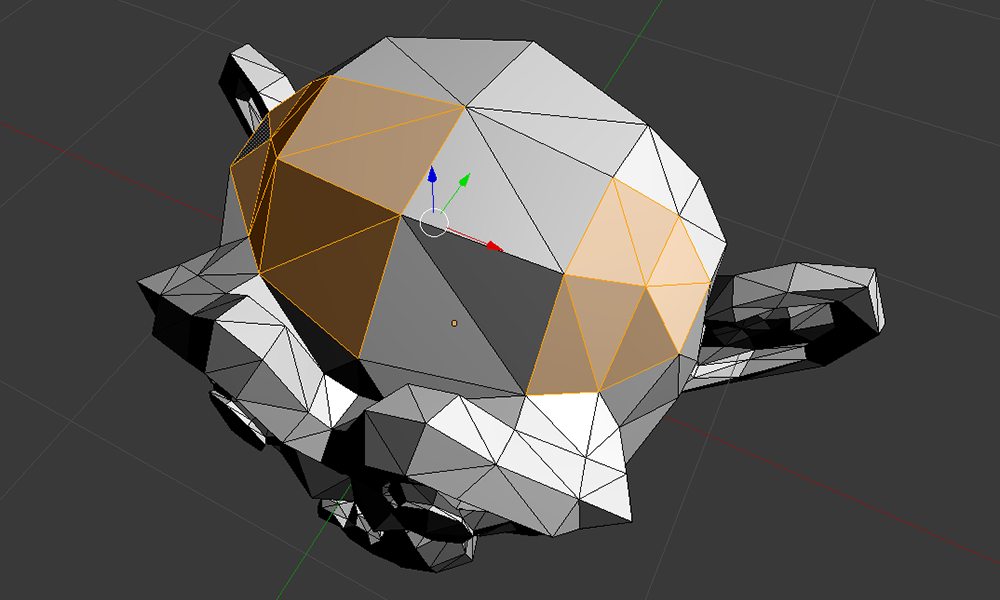
Два выделенных на модели кластера в Blender
Сперва нам понадобится получить все ребра контуров, ограничивающих выбранные кластеры. Для этого достаточно последовательно добавлять ребра в список. Если встречается совпадающее ребро, то его необходимо удалять, не добавляя при этом текущее. Для правильности работы такого алгоритма нужно ввести ограничение: на выбранном множестве треугольников не существует больше двух совпадающих ребер. В кейсах, где используется Extrude, модели зачастую удовлетворяют этому условию, а более сложный алгоритм требует больших вычислительных ресурсов.
internal static class LinkedListExtension
{
internal static IEnumerable<LinkedListNode<T>> Nodes<T>(this LinkedList<T> list)
{
for (var node = list.First; node != null; node = node.Next)
{
yield return node;
}
}
}
public struct Vertex
{
…
public bool IsInPosition(Vector3 other)
{
return Mathf.Abs(position.x - other.x) < Mathf.Epsilon &&
Mathf.Abs(position.y - other.y) < Mathf.Epsilon &&
Mathf.Abs(position.z - other.z) < Mathf.Epsilon;
}
}
public struct Edge
{
…
public bool Coincides(Edge other, bool includeDirection = false)
{
return v0.IsInPosition(other.v0.position) && v1.IsInPosition(other.v1.position) ||
!includeDirection &&
v1.IsInPosition(other.v0.position) && v0.IsInPosition(other.v1.position);
}
}
public class CustomMesh
{
…
private LinkedList<Edge> ObtainHullEdges(int[] triIndices)
{
var edges = new LinkedList<Edge>();
for (var i = 0; i < triIndices.Length; i++)
{
var edge = edges.Nodes().FirstOrDefault(e => e.Value.Coincides(Triangles[triIndices[i]].Edges[0]));
if (edge != null)
edges.Remove(edge);
else
edges.AddFirst(Triangles[triIndices[i]].Edges[0]);
edge = edges.Nodes().FirstOrDefault(e => e.Value.Coincides(Triangles[triIndices[i]].Edges[1]));
if (edge != null)
edges.Remove(edge);
else
edges.AddFirst(Triangles[triIndices[i]].Edges[1]);
edge = edges.Nodes().FirstOrDefault(e => e.Value.Coincides(Triangles[triIndices[i]].Edges[2]));
if (edge != null)
edges.Remove(edge);
else
edges.AddFirst(Triangles[triIndices[i]].Edges[2]);
}
return edges;
}
}
После получения всех ребер контура нужно построить соответствующие стенки. Вариантов реализации можно нафантазировать много, но мы решили пойти по пути наименьшего сопротивления — генерировать параллелограммы в направлении вектора движения на основе ребер по отдельности. Поскольку смещение у нас для всех одно, в результате этого действия параллелограммы будут образовывать сплошную и замкнутую стенку для каждого кластера. Остается определиться с ориентацией элементов стенки.
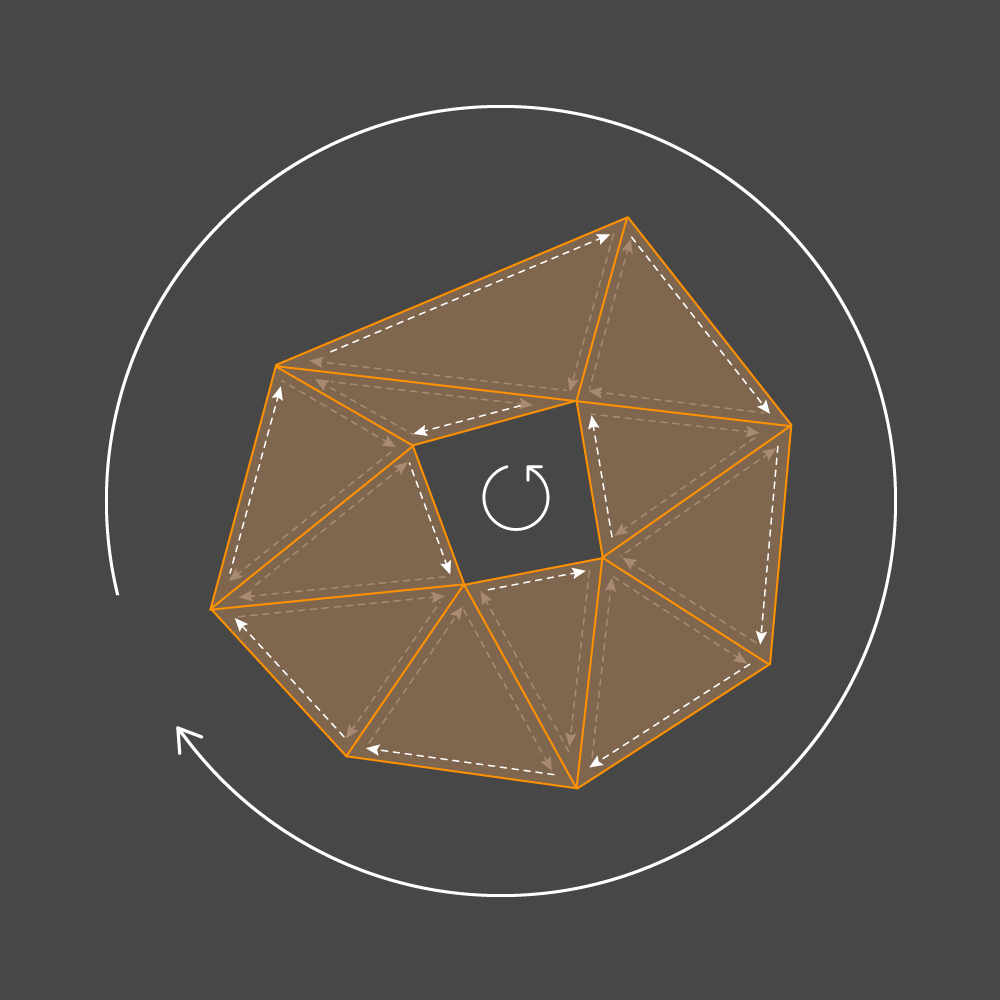
Стенка, как и весь меш, состоит из треугольников. По конвенции OpenGL обособленный треугольник рендерится на экране, если при проецировании его точек на плоскость экрана обход их по порядку соответствует обходу по часовой стрелке:
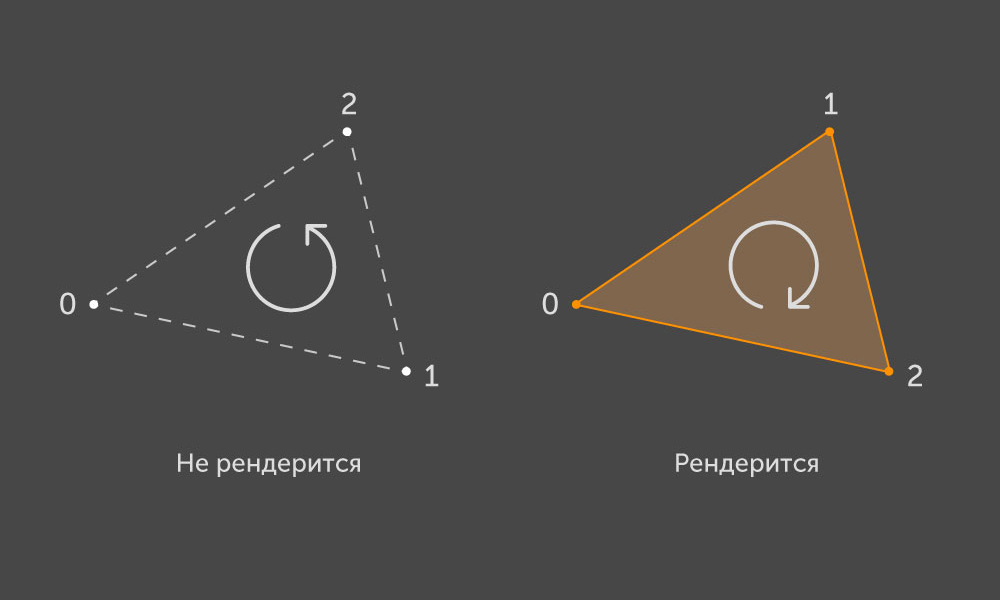
Так, треугольнику соответствует некоторый вектор нормали, определяющий лицевую сторону. Каждый треугольник ограничен выпуклым контуром, состоящим из трех ребер. У каждого ребра есть две вершины, в нашей структуре представленные как v0 и v1. Определим направление ребра так, что v0 — начало, v1 — конец. Теперь, если направление ребер треугольника задано в соответствии с обходом его вершин, то любой внешний контур кластера должен иметь обход либо по часовой стрелке, либо против, а любой внутренний — наоборот. Конструкторы CustomMesh и Triangle мы реализовали так, чтобы обход вершин всех треугольников соответствовал направлению хода часовой стрелки.
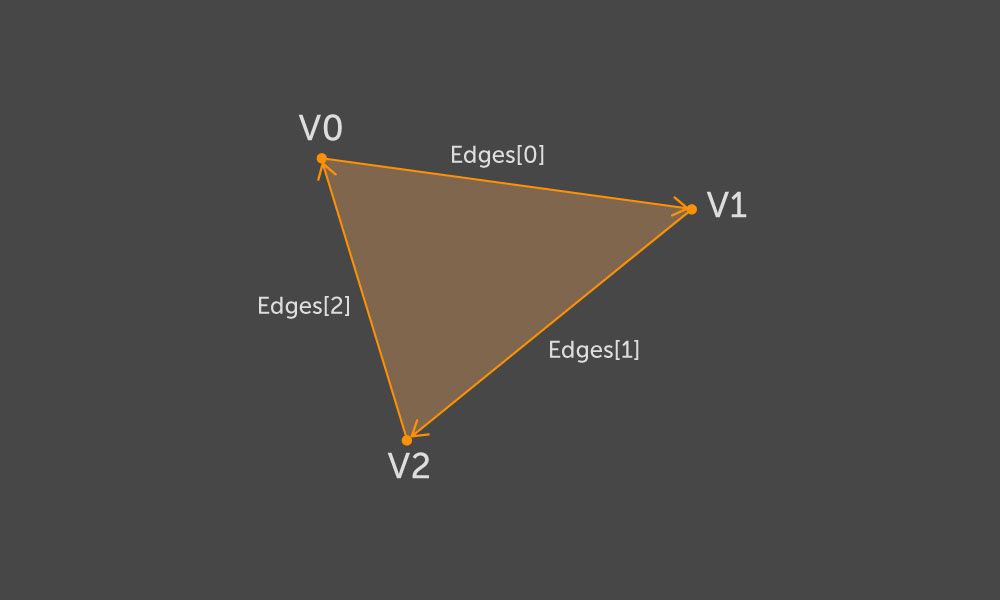
Имея направление обхода контура, можно точно сказать, с какой стороны от ребра находится внутренняя часть контура, а с какой — внешняя. Опираясь на эту информацию, мы будем выбирать ориентацию стенки. Пусть (v0, v1) — ребро, на основе которого нужно сгенерировать желаемый параллелограмм. Возьмем две точки v2 и v3 как позиции смещения v0 и v1. Затем построим два треугольника по следующей схеме:
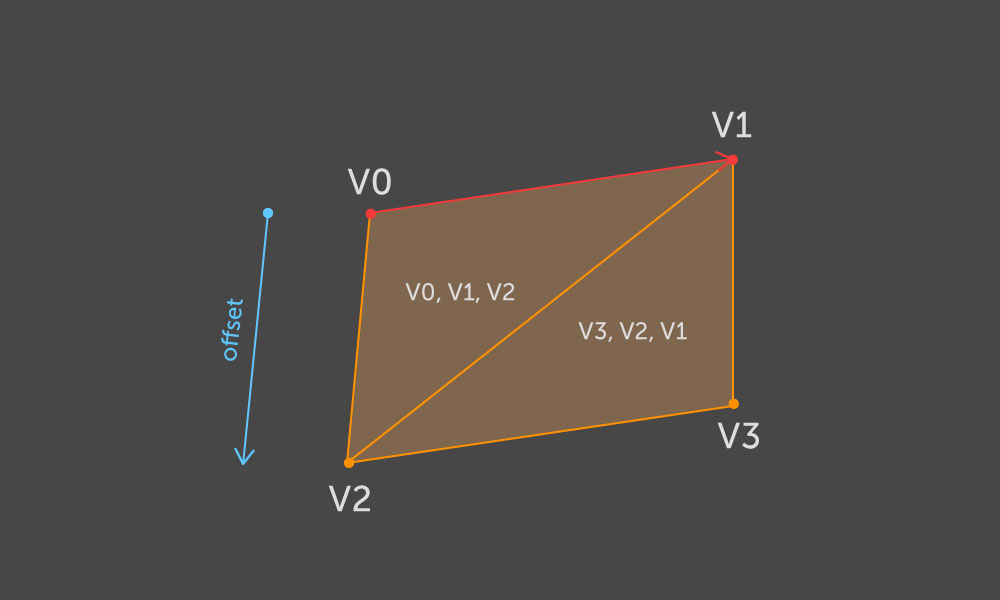
И так для каждого ребра контура.
public class CustomMesh
{
…
private void ExtrudeEdgesSet(Edge[] edges, Vector3 offset)
{
if (offset == Vector3.zero || edges == null || edges.Length == 0)
return;
var initVerticesLength = vertices.Length;
Array.Resize(ref vertices, initVerticesLength + edges.Length * 4);
if (normals != null && normals.Length == initVerticesLength)
{
Array.Resize(ref normals, vertices.Length);
}
if (uv0 != null && uv0.Length == initVerticesLength)
{
Array.Resize(ref uv0, vertices.Length);
}
if (uv2 != null && uv2.Length == initVerticesLength)
{
Array.Resize(ref uv2, vertices.Length);
}
if (colors != null && colors.Length == initVerticesLength)
{
Array.Resize(ref colors, vertices.Length);
}
var initTrianglesLength = Triangles.Length;
Array.Resize(ref Triangles, initTrianglesLength + edges.Length * 2);
edges
.AsParallel()
.Select((edge, i) =>
{
int j = initVerticesLength + i * 4;
vertices[j] = edge.v0.position;
vertices[j + 1] = edge.v1.position;
vertices[j + 2] = edge.v0.position + offset;
vertices[j + 3] = edge.v1.position + offset;
if (normals != null && normals.Length == vertices.Length)
{
var normal = Vector3.Cross(vertices[j + 1] - vertices[j], offset);
normals[j] = normals[j + 1] = normals[j + 2] = normals[j + 3] = normal;
}
if (uv0 != null && uv0.Length == vertices.Length)
{
uv0[j] = uv0[j + 2] = edge.v0.uv0;
uv0[j + 1] = uv0[j + 3] = edge.v1.uv0;
}
if (uv2 != null && uv2.Length == vertices.Length)
{
uv2[j] = uv2[j + 2] = edge.v0.uv2;
uv2[j + 1] = uv2[j + 3] = edge.v1.uv2;
}
if (colors != null && colors.Length == vertices.Length)
{
colors[j] = colors[j + 2] = edge.v0.color;
colors[j + 1] = colors[j + 3] = edge.v1.color;
}
Triangles[initTrianglesLength + i * 2] = new Triangle(
initTrianglesLength + i * 2,
Id,
j,
j + 1,
j + 2
);
Triangles[initTrianglesLength + i * 2 + 1] = new Triangle(
initTrianglesLength + i * 2 + 1,
Id,
j + 3,
j + 2,
j + 1
);
return true;
}).ToArray();
}
}
При таком подходе лицевая сторона генерируемых стенок будет корректной и для горок, и для ямок. Есть лишь одно существенное ограничение: множество треугольников, над которым выполняется операция Extrude, не должно заворачиваться под себя относительно вектора движения.
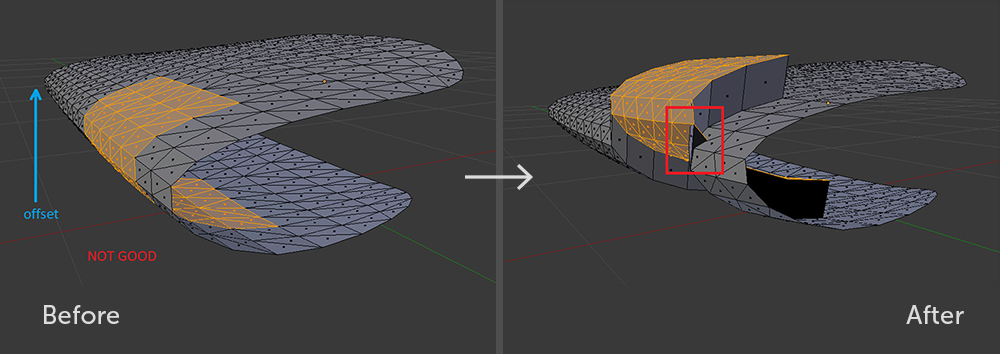
Подмножество полигонов, невалидное относительно смещения. Даже в Blender при таком Extrude не удастся избежать кривой геометрии
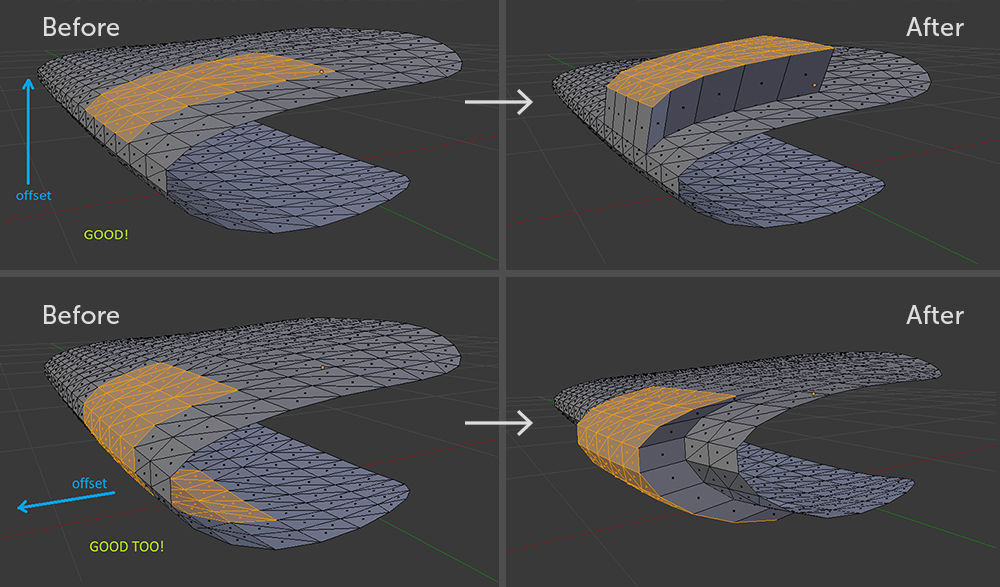
Валидные подмножества полигонов
Стенка готова, осталось сместить треугольники. Этот шаг алгоритма прост в понимании, хоть реализация и получилась громоздкой.
В нашем случае нужно убедиться, что каждая вершина кластера принадлежит только его треугольникам. Если не выполнить условие, то за кластером могут потянуться некоторые соседние полигоны. Решение этой ситуации — продублировать каждую вершину, принадлежащую как кластеру, так и остальной части модели. Затем для всех полигонов кластера заменить индекс данной вершины на индекс дубликата. Когда условие выполнено, перемещаем все вершины кластера на вектор движения.
public class CustomMesh
{
…
private void TranslateTrianglesHard(int[] triIndices, Vector3 offset, int[] hullVerts)
{
var newVertexIndices = new Dictionary<int, int>();
var initVerticesCount = vertices.Length;
Triangles.Where((t, i) => !triIndices.Contains(i)).Select(t =>
{
if (hullVerts.Contains(t.V0.Index) && !newVertexIndices.ContainsKey(t.V0.Index))
newVertexIndices.Add(t.V0.Index, initVerticesCount + newVertexIndices.Count);
if (hullVerts.Contains(t.V1.Index) && !newVertexIndices.ContainsKey(t.V1.Index))
newVertexIndices.Add(t.V1.Index, initVerticesCount + newVertexIndices.Count);
if (hullVerts.Contains(t.V2.Index) && !newVertexIndices.ContainsKey(t.V2.Index))
newVertexIndices.Add(t.V2.Index, initVerticesCount + newVertexIndices.Count);
return false;
}).ToArray();
Array.Resize(ref vertices, initVerticesCount + newVertexIndices.Count);
foreach (var pair in newVertexIndices)
vertices[pair.Value] = vertices[pair.Key] + offset;
if (normals != null && normals.Length == initVerticesCount)
{
Array.Resize(ref normals, vertices.Length);
foreach (var pair in newVertexIndices)
normals[pair.Value] = normals[pair.Key];
}
if (uv0 != null && uv0.Length == initVerticesCount)
{
Array.Resize(ref uv0, vertices.Length);
foreach (var pair in newVertexIndices)
uv0[pair.Value] = uv0[pair.Key];
}
if (uv2 != null && uv2.Length == initVerticesCount)
{
Array.Resize(ref uv2, vertices.Length);
foreach (var pair in newVertexIndices)
uv2[pair.Value] = uv2[pair.Key];
}
if (colors != null && colors.Length == initVerticesCount)
{
Array.Resize(ref colors, vertices.Length);
foreach (var pair in newVertexIndices)
colors[pair.Value] = colors[pair.Key];
}
var alreadyMoved = new HashSet<int>();
for (var i = 0; i < triIndices.Length; i++)
{
if (newVertexIndices.ContainsKey(Triangles[triIndices[i]].V0.Index))
{
var index = newVertexIndices[Triangles[triIndices[i]].V0.Index];
Triangles[triIndices[i]].Edges[0].v0.Index = index;
Triangles[triIndices[i]].Edges[2].v1.Index = index;
}
else if (!alreadyMoved.Contains(Triangles[triIndices[i]].V0.Index))
{
vertices[Triangles[triIndices[i]].V0.Index] += offset;
alreadyMoved.Add(Triangles[triIndices[i]].V0.Index);
}
if (newVertexIndices.ContainsKey(Triangles[triIndices[i]].V1.Index))
{
var index = newVertexIndices[Triangles[triIndices[i]].V1.Index];
Triangles[triIndices[i]].Edges[0].v1.Index = index;
Triangles[triIndices[i]].Edges[1].v0.Index = index;
}
else if (!alreadyMoved.Contains(Triangles[triIndices[i]].V1.Index))
{
vertices[Triangles[triIndices[i]].V1.Index] += offset;
alreadyMoved.Add(Triangles[triIndices[i]].V1.Index);
}
if (newVertexIndices.ContainsKey(Triangles[triIndices[i]].V2.Index))
{
var index = newVertexIndices[Triangles[triIndices[i]].V2.Index];
Triangles[triIndices[i]].Edges[1].v1.Index = index;
Triangles[triIndices[i]].Edges[2].v0.Index = index;
}
else if (!alreadyMoved.Contains(Triangles[triIndices[i]].V2.Index))
{
vertices[Triangles[triIndices[i]].V2.Index] += offset;
alreadyMoved.Add(Triangles[triIndices[i]].V2.Index);
}
}
}
}
Готово. Теперь, сложив результаты всех шагов, получаем ямку или горку.
public class CustomMesh
{
…
public void ExtrudeTriangles(int[] triIndices, Vector3 offset)
{
var edges = ObtainHullEdges(triIndices);
ExtrudeEdgesSet(edges.ToArray(), offset);
var hullVertices = edges.Select(edge => edge.v0.Index).ToArray();
TranslateTrianglesHard(triIndices, offset, hullVertices);
}
}
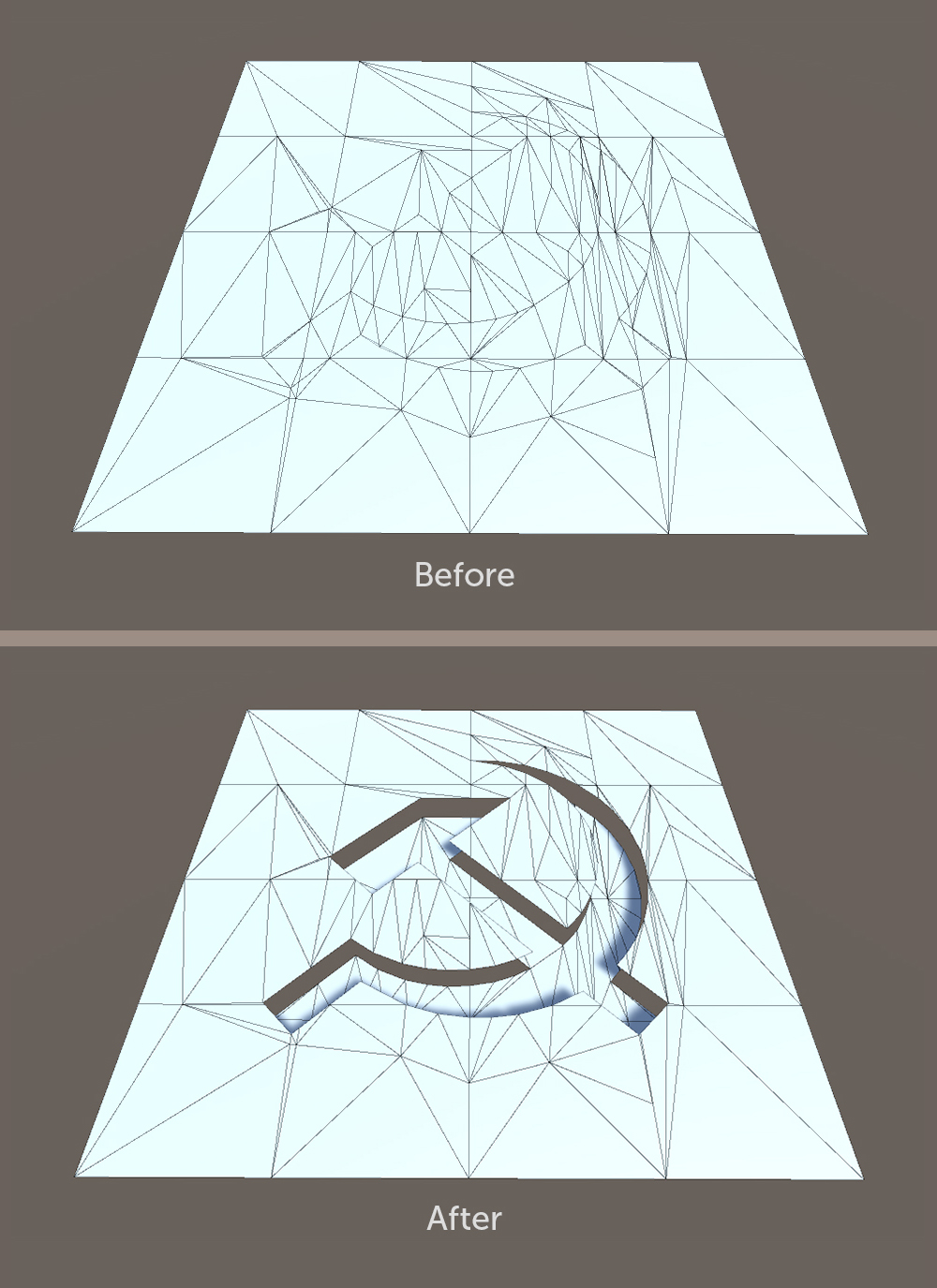
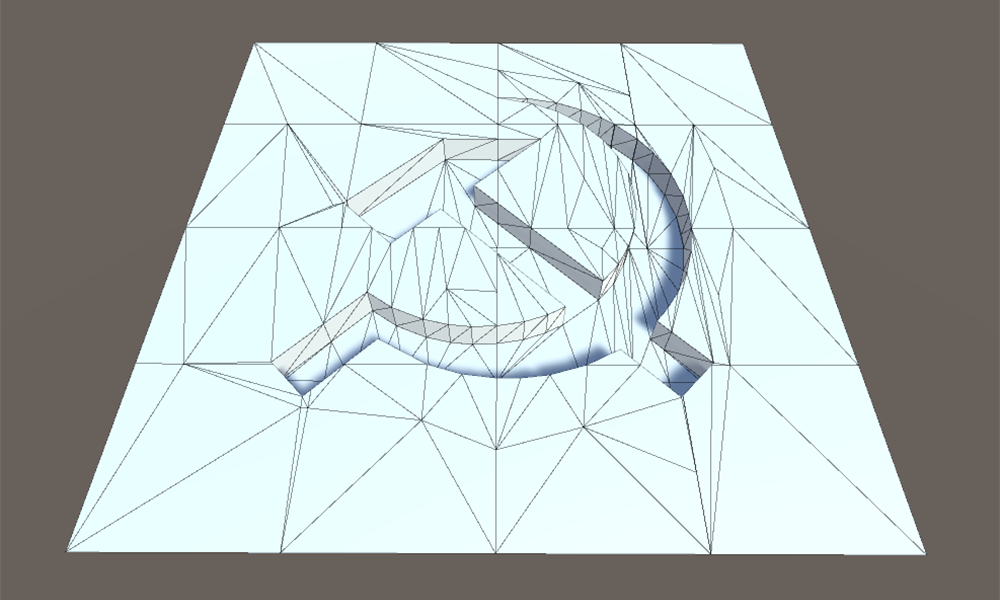
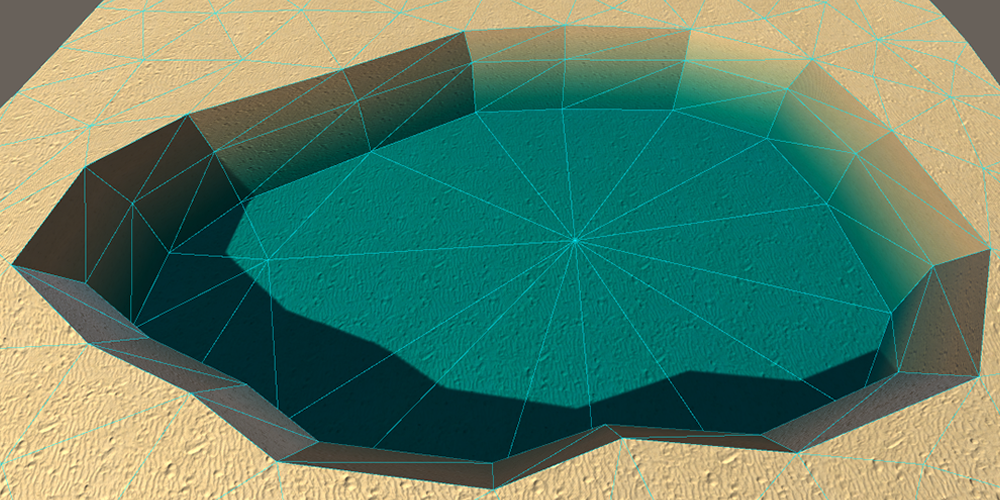
Пошаманив с координатами текстурной развертки и смещением точек контура, можно получить вот такое углубление:
И это еще не все
Помимо рассмотренных выше операций редактирования мы пользуемся и другими удобными методами работы с моделями.
Например, дополнительно мы написали метод Combine() для объединения двух CustomMesh. Ключевое отличие нашей реализации от UnityEngine.Mesh.CombineMeshes() в том, что если при объединении мешей какие-то вершины оказываются полностью эквивалентными, мы оставляем только одну из них, таким образом избегая лишней геометрии.
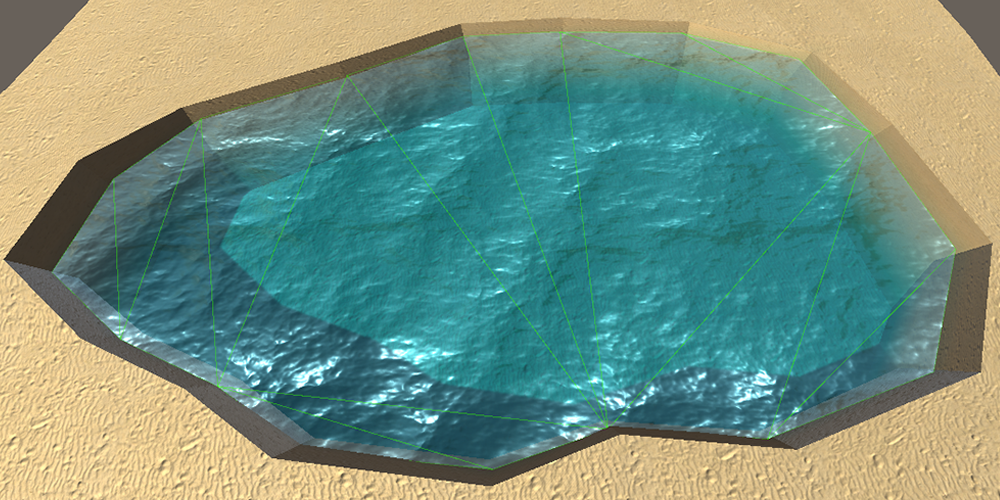
В том же модуле мы реализовали алгоритм плоской триангуляции Делоне. Используя его, можно, например, закрыть большую яму, созданную с помощью Extrude, плоской крышкой с текстурой воды и получить озеро:
Что же, с этим разобрались! В следующей статье рассмотрим особенности импорта .fbx в Unity и методы валидации моделей в проекте.
Комментариев нет:
Отправить комментарий