В школьные годы у меня был одноклассник, который мог послушать, как работает машина во дворе, и с серьезным лицом вынести вердикт: все в порядке, или что-то сломалось, и нужно срочно бежать за новыми деталями/маслом/инструментами! Я, как абсолютный чайник в автомобильном деле, всегда слышал обычное дребезжание очередной двенашки, никаких отличий не замечая и просто молча поражаясь его слуху и скилам.
Сейчас разбираться во внутренностях автомобиля я лучше не стал, зато начал работать с обработкой звуковых сигналов и машинным обучением, и здесь мы с вами постараемся понять, а возможно ли научить компьютер улавливать в звуке работы двигателя отклонения от нормы?
Как минимум, это просто интересно проверить, а в перспективе такая технология могла бы сэкономить кучу денег автовладельцам. По крайней мере в моем представлении, под капотом критичные поломки происходят постепенно, и на ранних стадиях, многие из них можно услышать, быстро и дешево исправить, сэкономив время, деньги и без того шаткие нервы.
Ну что, пожалуй, пора перейти от слов к делу. Поехали!
Сразу хочу сказать, что во всем, что касается математики и алгоритмов, я буду делать больший упор на смысл и понимание, формул и математических выкладок здесь не будет. Никаких новых алгоритмов я здесь не разработал, за формулами, при желании, лучше обратиться к гуглу и википедии, а также воспользоваться ссылками, которые я буду оставлять на протяжении всей статьи.
Все объяснения я буду приводить на примере звука двигателя с поломкой, взятого из этого ролика на YouTube.
Скачанный с ютуба файл (можно скачать с помощью браузерных расширений или просто изменив в ссылке youtube на ssyoutube) конвертируем в wav формат с помощью ffmpeg:
ffmpeg -i input_video.mp4 -c:a pcm_s16le -ar 16000 -ac 1 engine_sound.wav
Прежде чем начать обработку этого файла, скажу пару слов о том, что такое спектрограмма, и как она пригодится нам при решении этой задачи. Многие из вас, наверняка, видели подобную картинку — это амплитудно-временное представление звука или осциллограмма.
Если простым языком, то звук — это волна, и на осциллограмме наблюдаются значения амплитуды этой волны в заданные моменты времени.
Чтобы получить из такого представления спектрограмму, нам потребуется преобразование Фурье. С его помощью можно получить амплитудно-частотное представление звука или амплитудный спектр. Такой спектр показывает, на какой частоте и с какой амплитудой выражен исследуемый сигнал.
По сути, спектрограмма — это набор спектров коротких последовательных кусочков сигнала. Пожалуй, такого "определения" нам будет достаточно, чтобы не отвлекаться сильно от задачи. Все станет понятнее, если посмотреть на визуализацию спектрограммы (картинка получена с помощью WaveAssistant). По оси X здесь отложено время, по оси Y — частота, то есть каждый столбец в этой матрице — это модуль спектра в заданный момент времени.
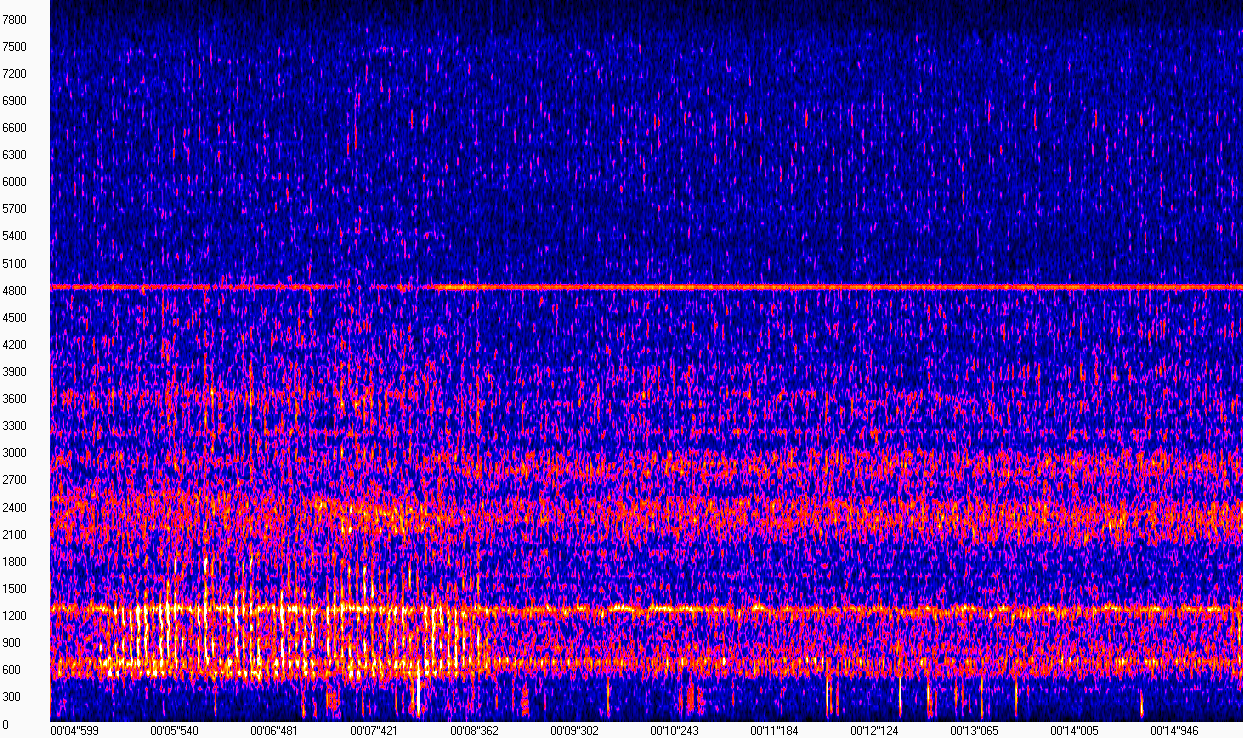
На этой спектрограмме видно, что звук двигателя при отсутствии постукивания "выглядит" примерно одинаково, и выражен на частотах в окрестности 600, 1200, 2400 и 4800 Гц. Звук стука, который беспокоит владельца, очень хорошо различим в диапазоне частот 600-1200 Гц с 5 по 8 секунду. Поскольку запись сделана в довольно шумных условиях на улице, на спектрограмме эти шумы также присутствуют, что несколько усложняет нашу задачу.
Тем не менее, глядя на такую спектрограмму, мы с уверенностью можем сказать, где стук был, а где его не было. У компьютера же глаз нет, поэтому нам нужно подобрать алгоритм, который будет способен различить подобное отклонение (а желательно и не только его) при условии наличия шумов в записи.
Рассчитать спектрограммы можно с помощью библиотеки librosa следующим образом:
from librosa.util import buf_to_float
from librosa.core import stft # функция для вычисления спектрограммы
import numpy as np
from scipy.io import wavfile # для работы с wav-файлами
def cut_wav(path_to_wav, start_time, end_time):
sr, wav_data = wavfile.read(path_to_wav)
return wav_data[int(sr * start_time): int(sr * end_time)]
def get_stft(wav_data):
feat = np.abs(stft(buf_to_float(wav_data), n_fft=fft_size, hop_length=fft_step))
# транспонирование - ставим ось времени на первое место
return feat.T
wav_path = './engine_sound.wav'
train_features = []
# готовим признаки для обучения, time_list - содержит разметку данных
for [ts, te] in time_list:
wav_part = cut_wav(wav_path, ts, te)
spec = get_stft(wav_part)
train_features.append(spec)
X_train = np.vstack(train_features)
# готовим признаки для теста
full_wav_data = wavfile.read(wav_path)[1]
X_test = get_stft(full_wav_data)
Строго говоря, нам нужно решить задачу бинарной классификации, где нужно определить, сломан двигатель или работает в штатном режиме. Подобные задачи мы с коллегой уже описывали в своей предыдущей статье, там мы использовали сверточную нейронную сеть для классификации акустических событий. Здесь же такое решение вряд ли представляется возможным: нейронки очень любят, когда им даешь большие датасеты. Мы же имеем дело с одной вавкой длительностью чуть больше минуты, что большим датасетом явно не назовешь.
Выбор был остановлен на Gaussian Mixture Model (модель Гауссовых смесей). Хорошую статью, подробно описывающую принцип работы и обучения этой модели можно найти здесь Общая идея же этой модели заключается в том, чтобы описать данные с помощью сложного распределения в виде линейной комбинации нескольких многомерных нормальных распределений (подробнее о многомерном нормальном распределении здесь).
Так как двигатель в процессе своей работы звучит примерно "одинаково", звук его работы можно считать стационарным, и идея описания этого звука с помощью такого распределения выглядит вполне осмысленной. Чтобы понять суть GMM я очень рекомендую посмотреть пример обучения и выбора количества гауссоид здесь.
Наш случай отличается от представленных выше примеров тем, что вместо точек на двумерной плоскости будут использоваться значения спектра, взятые из спектрограммы сигнала. Подбирать параметры распределения, такие как тип ковариационной матрицы можно с помощью BIC критерия (пример, описание), однако в моем случае оптимальные с точки зрения этого критерия параметры показали себя хуже, чем те, что приведены в коде ниже:
from sklearn.mixture import GaussianMixture
n_components = 3
gmm_clf = GaussianMixture(n_components)
gmm_clf.fit(X_train)
Предполагая, что звук нормальной работы описывается распределением, параметры которого подобрались в процессе обучения, можно замерять, насколько любой звук "близок" к этому распределению.
Чтобы это сделать, можно вычислить среднее правдоподобие столбцов спектрограммы исследуемого сигнала, а затем подобрать порог, который будет отделять правдоподобие звуков хорошей работы от всех остальных. Построить правдоподобие для каждой секунды можно следующим образом:
n_seconds = len(full_wav_data) // sr
gmm_scores = []
# правдоподобие на каждую секунду
for i in range(n_seconds - 1):
test_sec = X_test[(i * sr) // fft_step: ((i + 1) * sr) // fft_step, :]
sc = gmm_clf.score(test_sec)
gmm_scores.append(sc)
Если отобразить полученные правдоподобия на графике, то получим следующую картинку.
В верхней части изображена спектрограмма сигнала, отображенная с помощью библиотеки matplotlib. Изменения, вызванные стуком, на ней заметны не так сильно, как на примере выше (именно поэтому здесь вы увидели 2 изображения). Тем не менее, если приглядеться, их все равно можно разглядеть. Вертикальными линиями помечены времена начала и конца стуков.
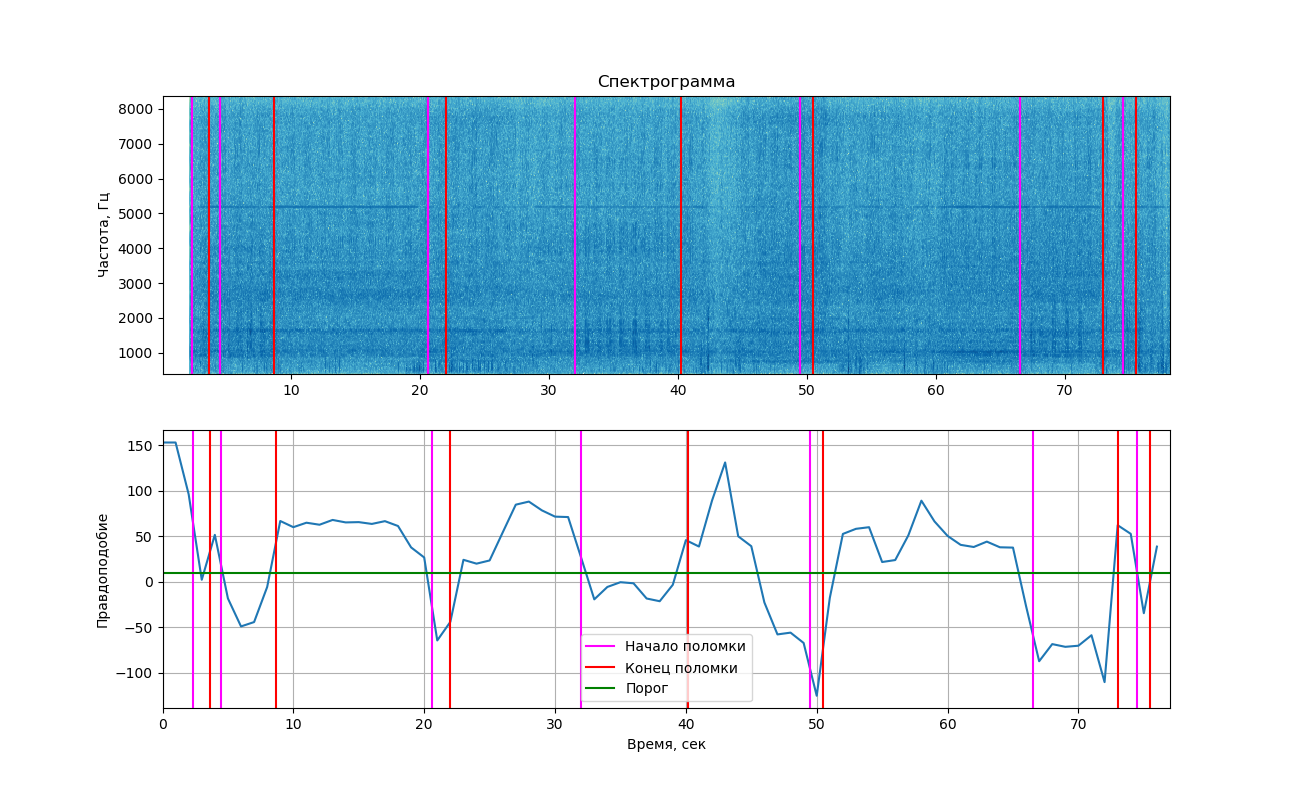
Как видно из графика, в моменты звучания стука правдоподобие действительно становилось ниже порога, а значит, мы бы смогли разделить два этих класса (работа со стуком и без него). Но нужно сказать, что это значение находится достаточно близко к пороговому и в участках, где стук не слышен. Это происходит потому, что в записи часто встречаются посторонние шумы, которые также влияют на величину правдоподобия.
Добавим сюда обучения на буквально нескольких секундах звука, плохие условия записи, и уже можно вообще удивляться тому, что эксперимент хоть как-то удался!
Скорее всего, чтобы этот способ применить на практике и быть уверенным в его надежности, звука придется записать куда больше, а также хорошо разместить микрофон, чтобы свести попадание шумов на записи к минимуму.
Эта статья — лишь попытка решить подобную задачу, не претендующая на абсолютную правильность, если у вас есть идеи и предложения, а может быть вопросы, давайте обсудим их вместе в комментах или лично.
Полный код на github — здесь
Комментариев нет:
Отправить комментарий