
Преимущества и варианты использования
Использование мотора в качестве тормоза даёт ряд преимуществ и параметров, которых не достичь, используя другие, доступные на данный момент, виды тормозов. Однако у данного подхода есть и недостатки.
Преимущества:
- Быстрый режим включения/выключения и выставления тормозного момента.
- Широкий диапазон рабочих оборотов. Возможно сделать и сверх оборотистый тормоз ( до 100 000 rpm), так наоборот и очень медленный.
- Плавная установка нагрузки, отсутствие возможности случайной блокировки вала.
- Отсутствие пыли и отработанных материалов от тормоза. Можно использовать в помещении или замкнутом объёме.
- Можно использовать в качестве генератора.
Недостатки:
- Ограничения по рабочей температуре до 150, 200 градусов. Немного поднять температуру возможно, но при этом цена изделия возрастает очень сильно.
- Обычный тормоз из диска и колодок в тех же габаритах будет эффективнее.
- Сильные ограничения по моменту на низких оборотах и невозможность полностью заблокировать вал. Данное ограничение можно обойти с применением контроллера с внешним питанием.
- Постоянное наличие небольшого тормозного момента.
Благодаря своей скорости, точности и чистоте, такой тормоз незаменим в лабораториях и закрытых приборах. Близким аналогом мотора-тормоза, является порошковый тормоз. Он такой же быстрый, не создаёт пыль, но он не может работать на высоких оборотах и большинство существующих моделей и вовсе ограниченны 1500-3000rpm. Обычный дисковый тормоз не способен обеспечить такую же точность и стабильность работы.
Режимы работы
Для электромагнитного тормоза доступны 3 режима торможения, они различаются тем, куда идёт энергия от торможения:
- Режим замыкания и выделения тепла непосредственно в моторе.
- Выделение тепла на внешней нагрузке, сопротивлении или биполярном транзисторе.
- Рекуперация и зарядка аккумулятора.
Далее я подробнее расскажу об этих режимах для моторов синхронного типа с постоянными магнитами BLDC, также это применимо и к обычным DC.
1. Режим замыкания
Это самый простой режим. В нём контакты мотора просто замыкаются, и тормозная мощность выделяется на сопротивлении обмотки мотора. Моторы изначально спроектированы с уклоном на охлаждение и к тому же они обладают достаточно большой массой и теплоёмкостью. Это позволяет достаточно интенсивно использовать такой режим без доработок мотора/генератора.
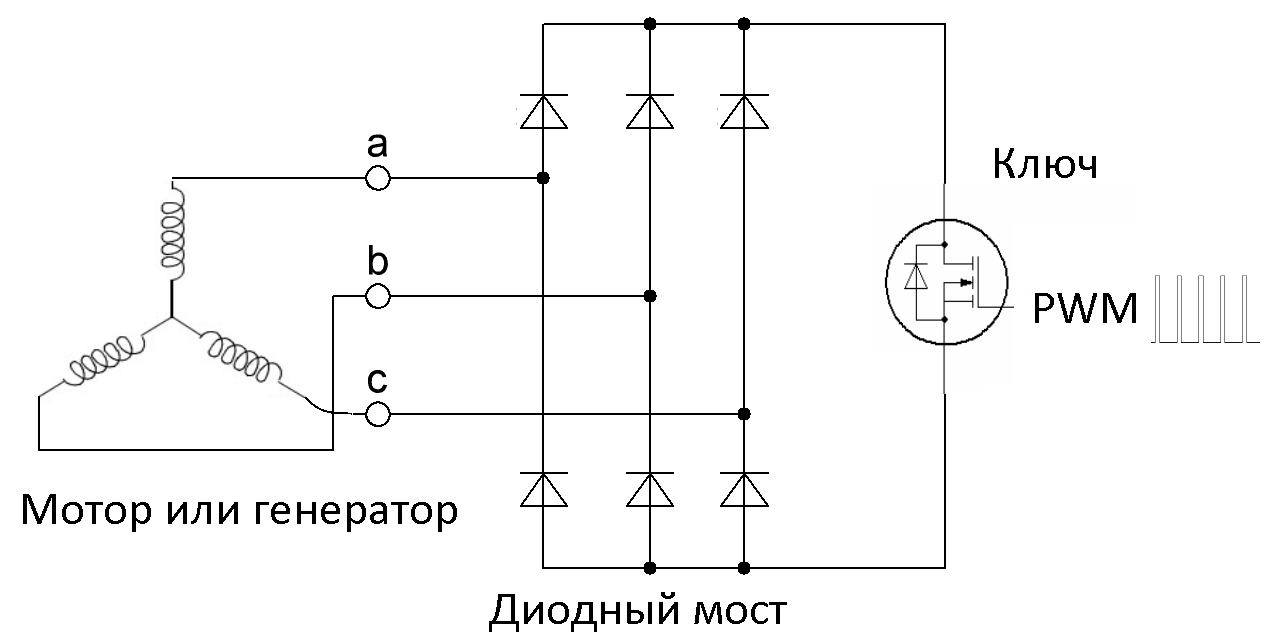
Для реализации данного режимы достаточно диодного моста и механического (кнопки, рубильника или реле) или электронного ключа (MOSFET, IGBT). Для корректировки тормозного усилия применяется ШИМ, который задаёт скважность открытия ключа. Схема подключения выглядит следующим образом:
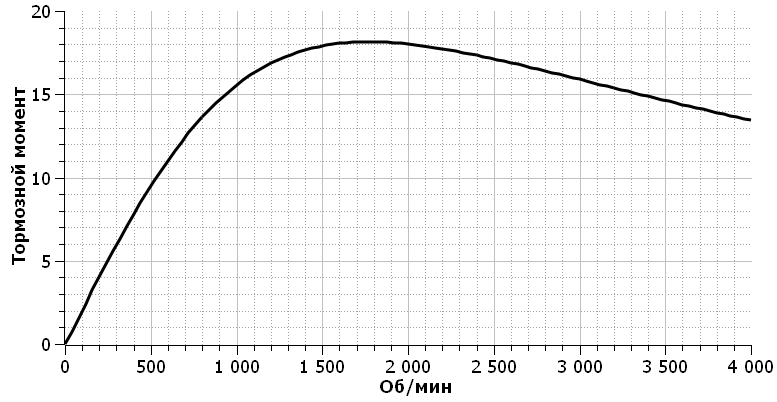
Данный режим имеет интересную особенность. С ростом оборотов максимальный тормозной момент будет падать. Это связанно с тем, что обмотка мотора имеет значительную индуктивность и с ростом оборотов, растёт и частота токов. В результате реактивное сопротивление обмотки превысит активное и мощность потерь будет ниже максимально возможной для этого мотора. Характерная зависимость максимального тормозного момента от оборотов показана на графике ниже:
Несмотря на то, что любой готовый мотор можно сразу использовать в таком режиме, такой режим не позволит раскрыть весь потенциал изделия. Однако характеристики работы тормоза в таком режиме можно значительно повысить, есть его изначально проектировать как тормоз.
У этого режима есть ещё один важный недостаток. Из-за быстрого и резкого замыкания и размыкания обмоток будут возникать сильные электромагнитные помехи. Также диодный мост должен быть рассчитан на большие импульсные токи.
2. С внешней нагрузкой
В данном режиме основным источником выделения тепла от торможения служит внешнее сопротивление. Этот режим гораздо более эффективный, так как тормозная мощность более не ограниченна теплоотводом тепла мотора, а радиатор на сопротивлении можно сделать сколь угодно большим. Кроме того, если правильно подстраивать величину сопротивления, то максимальный тормозной момент будет выше, чем просто при замыкании и чем выше обороты, тем существеннее это будет проявляться.
Для реализации данного режима также необходим диодный мост, но после него включается либо механический реостат, либо полевой транзистор со схемой контроля тока, либо сопротивления (схема электронной нагрузки). Схема подключения выглядит следующим образом:

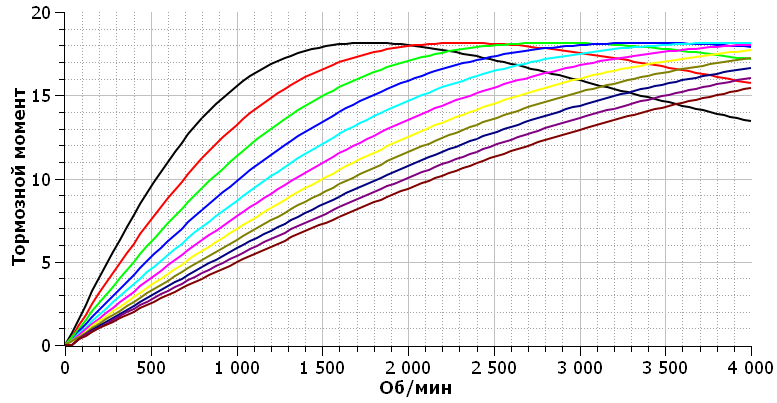
При малой величине внешнего сопротивления относительно сопротивления мотора, характер тормозного момента будет близок к первому режиму. При увеличении сопротивления точка пикового момента будет смещаться к большим оборотам, и максимальная тормозная мощность будет расти. Динамика изменения тормозного момента с ростом сопротивления нагрузки показана на графике ниже:
Данный режим позволяет получить на нужном диапазоне рабочих оборотов участок, на котором тормозной момент возрастает с ростом оборотов. Этот режим работы крайне удачный, так как он позволяет стабилизировать обороты или ограничить их. Образуется стабильная система с обратной связью.
3. Рекуперация
Данный режим самый сложный в реализации. Он требует контроллера (ESC) наподобие тех, что применяется для управления бесколлекторными моторами BLDC. Но при этом данный режим и самый эффективный. Он способен устранить большинство недостатков тормоза такого типа. Так, например, контроллер позволит полностью блокировать вал мотора, он позволит использовать тормоз одновременно в режиме генерации и контролируемого торможения и в данном режиме можно достигнуть тормозных моментов значительно выше, чем в предыдущих 2х.
В данной статья я не буду подробно описывать устройство контроллера и алгоритмы его работы, т.к. эта тема для отдельной статьи и возможно и не одной. Для желающих разобраться в данном вопросе можно изучить принцип работы контроллера в электротранспорте (велосипедах, самокатах) и то как в них реализовав алгоритмы торможения и рекуперации.
Вывод
Мотор и генераторы являются недорогими и простыми вариантами электротормоза, обладающего уникальными параметрами. Такой тормоз не универсален и не позволит заменить классические дисковые тормоза, но для некоторых задач они вне конкуренции.
Комментариев нет:
Отправить комментарий