
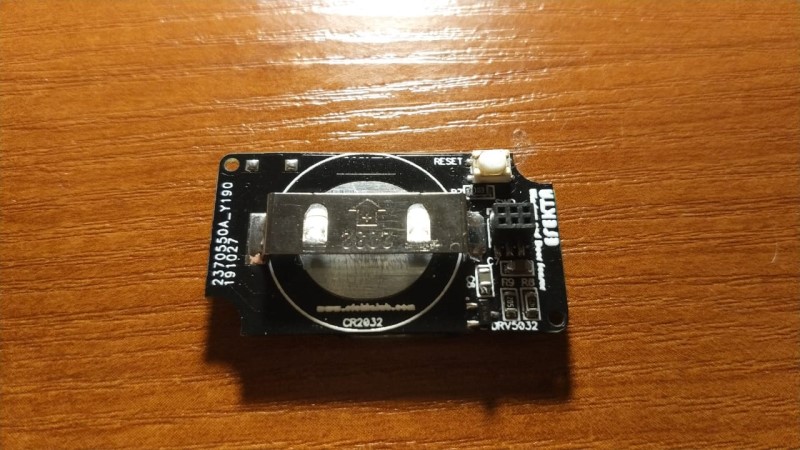
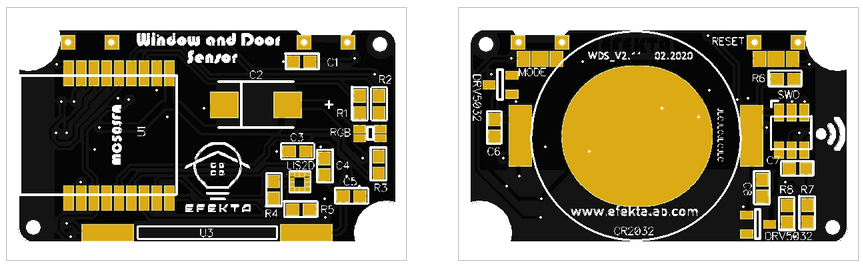
Для версии на чипе nRF52840 был использован модуль E73_2G4M08S1C компании EBYTE, для верcии на чипе nRF52811 модуль MC50SFA компании MINEW. Чесно говоря поиски доступных чипов nRF52811 это было то еще приключение. Но в итоге этого приключения в устройстве модуль на чипе nRF52811 от компании MINEW и плюшки в виде нескольких вариантов чипов напаиваемых на эти модули — nRF52810 и nRF52832.
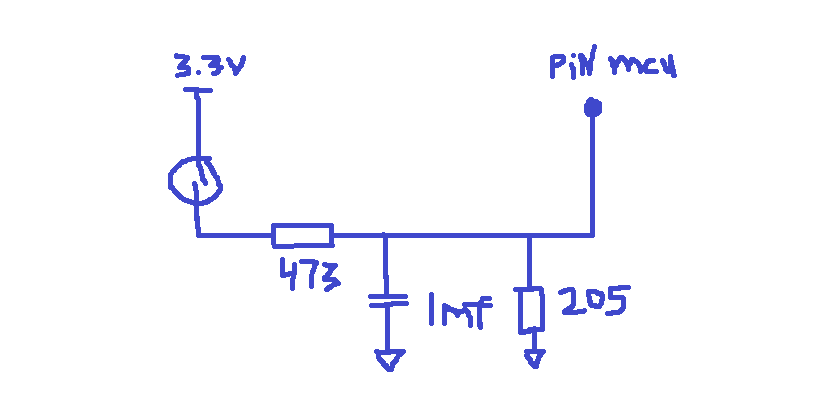
Основной функционал устройства это детектирование открытия и закрытия на основе герконового датчика. Схема герконового сенсора реазизована с антидребезгом.
Ардуино схема:
Обдумывая чем бы было уместно разбавить основной функционал данного датчика открытия и закрытия, решил посмотреть а что же есть по этому поводу на рынке. Как оказалось практически ничего, датчик открытия и закрытия он и в Африке датчик открытия и закрытия. Наиболее «продвинутое» решение нашлось у компании REDMOND. В их BLE датчике (кстати тоже на чипе от компании Nordic) в дополнение к герконовому сенсору присутствует датчик температуры и емкосная кнопка реализованная на микросхеме TTP223. Но мне почему то это показалось не совсем удачным решением, чем полезны показания температуры около двери или окна(и что мешало ее мерять чипом) и в каких ситуация уместно использовать кнопку на датчике висящем на окне или двери(ну разве что входной :)). В итоге решил расширить охранные функции у моего датчика.

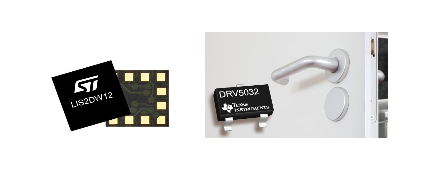
Основным критерием отбора было потребление дополнительных сенсоров, так как в данном датчике решено было использовать батарейку CR2032. Победителями среди кандидатов стали два датчика, акселерометр LIS2DW12 и датчик магнитного поля DRV5032FB.
LIS2DW12 на данный момент является наверное самым экономичным акселерометром. В режиме низкого потребления данный акселерометр потребляет 1 мкА (даташит). Так же просто отличные характеристики по потреблению показал датчик магнитного поля DRV5032FB. Его потребление составляет в районе 500нА (даташит).
Акселерометр было решено использовать в режиме датчика удара, а датчик магнитного поля по его прямому предназначению. Если за функционал датчика удара я был спокоен, то использование датчика магнитного поля все же является сильно эксперементальным решением, но все лучше чем датчик температуры.
Програмная часть проекта была сделана для работы датчика в сети Майсенсорс. По крайней мере пока это так. Майсенсорс в варианте работы на чипах компании Nordic(nRF24(+atmega 328, stm32f1), nRF51 и nRF52) на нижнем уровне использует проприетарный протокол компании Nordic — Enhanced ShockBurst (ESB), тем самым обеспечивается совместимость устройств на nRF24 и nRF51-52. Майсенсорс это открытый Ардуино проект вокруг которого уже образовалось довольно большое сообщество во многих странах мира. Но чем хороши решения на чипах nRF52 так это тем что использвать Майсенсорс(ESB) совсем не обязательно. Достаточно просто заменит ПО в основе которого работа на протоколе Zigbee или BLE, так как чипы мультипротокольные.… По поводу BLE, немного отвлекусь, посмотрите какое замечательное Arduino NANO 33 Ble можно сделать из модуля E73_2G4M08S1C, стоимость моей NANO 33 — $4.
Скетч к датчику делал в Ардуино ИДЕ из дополнительных библиотек была использована библиотека для акселерометра LIS2DW12, немного измененная мною в части дефолтных настроек регистров, в моем варианте она работает сразу с настройками самого низкого варианта энергопотребления(доступна на моем гите).
Немного опишу логику работы программы. В основном режиме работы датчик находится во сне с настроенными внешними прерываниями, всего 4 прерывания. Есть две конфигурации прерываний, конфиги перенастраивают прерывания в процессе работы программы в зависимости в каком состоянии находится герконовый датчик. Если дверь открыта то прерывания для датчика удара и датчика магитного поля отключаются. Как только дверь закрывется прерывания для двух данных сенсоров активируются. Так же столкнулся с тем что во время открытия возникали ситуации когда датчик удара срабатывал раньше герконового датчика, это происходило от вибраций во время открытия замка. Данная неприятность фиксировалась только при настроеной высокой чувствительности акселерометра.
Для устранения этой проблемы было введено ожидание в 2 секунды при срабатывании акселерометра, во время которого мониторится пин герконового датчика. Если во время ожидания происходит изменение уровня на пине герконового датчика, то дальнейшая обработка события по прерыванию от акселерометра останавливается и начинается обработка события от геркона.
Датчик имеет режим конфигурирования. При нажатии на сервисную кнопку датчик просыпается по прерыванию, радиомодуль включается в режим прослушивания и ждет входящих команд с контроллера УД. Если команда получена, датчик записывает в память новое значение и переключается в рабочий режим сразу уходя в сон. Для отправки следующей команды процедуру активирования режима конфигурирования необходимо повторить. Если находясь в режиме конфигурирования датчик в течении 30 секунд ничего не получает то также по истечению этого времени переключается в рабочий режим и уходит в сон. Помимо режима конфигурации с сервисной кнопки можно запустить презентацию сенсоров датчика и заводской сброс настроек(датчик забывает сеть в которую добавлен, регистрацию датчика после сброса настроек необходимо пройти заново).




Для программирования датчика в Ардуино ИДЕ необходимо добавить поддержку следующих плат:
sandeepmistry/arduino-nRF5
mysensors/ArduinoBoards
Библиотеки:
Mysensor
LIS2DW12
Программатор: st-link, j-link.
bool configMode = 0;
int8_t int_status = 0;
bool door_status = 1;
bool check;
bool magnet_status = 1;
bool nosleep = 0;
bool button_flag = 0;
bool onoff = 1;
bool flag_update_transport_param;
bool flag_sendRoute_parent;
bool flag_no_present;
bool flag_nogateway_mode;
bool flag_find_parent_process;
bool flag_fcount;
bool Ack_TL;
bool Ack_FP;
bool PRESENT_ACK;
bool send_a;
bool batt_flag;
byte conf_vibro_set = 2;
byte err_delivery_beat;
byte problem_mode_count;
uint8_t countbatt = 0;
uint8_t batt_cap;
uint8_t old_batt_cap = 100;
uint32_t BATT_TIME;
uint32_t SLEEP_TIME = 10800000;
uint32_t SLEEP_NOGW = 60000;
uint32_t oldmillis;
uint32_t newmillis;
uint32_t previousMillis;
uint32_t lightMillisR;
uint32_t configMillis;
uint32_t interrupt_time;
uint32_t SLEEP_TIME_W;
uint32_t axel_time;
uint32_t axel_time0;
int16_t myid;
int16_t mypar;
int16_t old_mypar = -1;
bool vibro = 1;
uint32_t PIN_BUTTON_MASK;
uint32_t AXEL_INT_MASK;
uint32_t GERKON_INT_MASK;
uint32_t MAGNET_INT_MASK;
float ODR_1Hz6_LP_ONLY = 1.6f;
float ODR_12Hz5 = 12.5f;
float ODR_25Hz = 25.0f;
float ODR_50Hz = 50.0f;
float ODR_100Hz = 100.0f;
float ODR_200Hz = 200.0f;
volatile byte axelIntStatus = 0;
volatile byte gerkIntStatus = 0;
volatile byte magIntStatus = 0;
volatile byte buttIntStatus = 0;
uint16_t batteryVoltage;
int16_t linkQuality;
int16_t old_linkQuality;
//#define MY_DEBUG
#ifndef MY_DEBUG
#define MY_DISABLED_SERIAL
#endif
#define MY_RADIO_NRF5_ESB
int16_t mtwr;
#define MY_TRANSPORT_WAIT_READY_MS (mtwr)
#define MY_NRF5_ESB_PA_LEVEL (NRF5_PA_MAX)
#include <MySensors.h>
extern "C" {
#include "app_gpiote.h"
#include "nrf_gpio.h"
}
#define APP_GPIOTE_MAX_USERS 1
static app_gpiote_user_id_t m_gpiote_user_id;
#include <LIS2DW12Sensor.h>
LIS2DW12Sensor *lis2;
#define DWS_CHILD_ID 0
#define V_SENS_CHILD_ID 1
#define M_CHILD_ID 2
#define LEVEL_SENSIV_V_SENS_CHILD_ID 230
#define SIGNAL_Q_ID 250
MyMessage dwsMsg(DWS_CHILD_ID, V_TRIPPED);
MyMessage mMsg(M_CHILD_ID, V_TRIPPED);
MyMessage vibroMsg(V_SENS_CHILD_ID, V_TRIPPED);
MyMessage conf_vsensMsg(LEVEL_SENSIV_V_SENS_CHILD_ID, V_VAR1);
#define SN "DOOR & WINDOW SENS"
#define SV "1.12"
void before() {
board_Init();
happy_init();
delay(500);
batteryVoltage = hwCPUVoltage();
digitalWrite(BLUE_LED, LOW);
}
void presentation()
{
NRF_POWER->DCDCEN = 0;
wait(10);
check = sendSketchInfo(SN, SV);
wait(30);
if (!check) {
_transportSM.failedUplinkTransmissions = 0;
wait(30);
check = sendSketchInfo(SN, SV);
wait(30);
_transportSM.failedUplinkTransmissions = 0;
}
if (check) {
blinky(1, 1, BLUE_LED);
} else {
blinky(1, 1, RED_LED);
}
check = present(DWS_CHILD_ID, S_DOOR, "STATUS RS SENS");
wait(40);
if (!check) {
_transportSM.failedUplinkTransmissions = 0;
wait(40);
check = present(DWS_CHILD_ID, S_DOOR, "STATUS RS SENS");
wait(40);
_transportSM.failedUplinkTransmissions = 0;
}
if (check) {
blinky(1, 1, BLUE_LED);
} else {
blinky(1, 1, RED_LED);
}
check = present(V_SENS_CHILD_ID, S_VIBRATION, "STATUS SHOCK SENS");
wait(50);
if (!check) {
_transportSM.failedUplinkTransmissions = 0;
wait(50);
check = present(V_SENS_CHILD_ID, S_VIBRATION, "STATUS SHOCK SENS");
wait(50);
_transportSM.failedUplinkTransmissions = 0;
}
if (check) {
blinky(1, 1, BLUE_LED);
} else {
blinky(1, 1, RED_LED);
}
check = present(M_CHILD_ID, S_DOOR, "ANTI-MAGNET ALARM");
wait(60);
if (!check) {
_transportSM.failedUplinkTransmissions = 0;
wait(60);
check = present(M_CHILD_ID, S_DOOR, "ANTI-MAGNET ALARM");
wait(60);
_transportSM.failedUplinkTransmissions = 0;
}
if (check) {
blinky(1, 1, BLUE_LED);
} else {
blinky(1, 1, RED_LED);
}
check = present(SIGNAL_Q_ID, S_CUSTOM, "SIGNAL %");
wait(70);
if (!check) {
_transportSM.failedUplinkTransmissions = 0;
wait(70);
check = present(SIGNAL_Q_ID, S_CUSTOM, "SIGNAL %");
wait(70);
_transportSM.failedUplinkTransmissions = 0;
}
if (check) {
blinky(1, 1, BLUE_LED);
} else {
blinky(1, 1, RED_LED);
}
check = present(LEVEL_SENSIV_V_SENS_CHILD_ID, S_CUSTOM, "SENS LEVEL VIBRO");
wait(80);
if (!check) {
_transportSM.failedUplinkTransmissions = 0;
wait(80);
check = present(LEVEL_SENSIV_V_SENS_CHILD_ID, S_CUSTOM, "SENS LEVEL VIBRO");
wait(80);
_transportSM.failedUplinkTransmissions = 0;
}
if (check) {
blinky(1, 1, BLUE_LED);
} else {
blinky(1, 1, RED_LED);
}
check = send(conf_vsensMsg.set(conf_vibro_set));
wait(90);
if (!check) {
_transportSM.failedUplinkTransmissions = 0;
wait(90);
check = send(conf_vsensMsg.set(conf_vibro_set));
wait(90);
_transportSM.failedUplinkTransmissions = 0;
}
if (check) {
blinky(1, 1, BLUE_LED);
} else {
blinky(1, 1, RED_LED);
}
NRF_POWER->DCDCEN = 0;
wait(10);
}
void setup() {
digitalWrite(BLUE_LED, HIGH);
config_Happy_node();
sensors_Init();
}
void loop() {
if (flag_update_transport_param == 1) {
update_Happy_transport();
}
if (flag_sendRoute_parent == 1) {
present_only_parent();
}
if (isTransportReady() == true) {
if (flag_nogateway_mode == 0) {
if (flag_find_parent_process == 1) {
find_parent_process();
}
if (configMode == 0) {
if ((axelIntStatus == AXEL_INT) || (buttIntStatus == PIN_BUTTON) || (gerkIntStatus == GERKON_INT) || (magIntStatus == MAGNET_INT)) {
nosleep = 1;
newmillis = millis();
interrupt_time = newmillis - oldmillis;
BATT_TIME = BATT_TIME - interrupt_time;
if (BATT_TIME < 60000) {
BATT_TIME = SLEEP_TIME;
batteryVoltage = hwCPUVoltage();
batt_flag = 1;
}
if (gerkIntStatus == GERKON_INT) {
send_Gerkon();
axel_time = millis();
nosleep = 0;
}
if (magIntStatus == MAGNET_INT) {
send_Magnet();
nosleep = 0;
}
if (axelIntStatus == AXEL_INT) {
if (millis() - axel_time0 >= 2000) {
send_Axel();
nosleep = 0;
} else {
if (digitalRead(GERKON_INT) == LOW) {
send_Gerkon();
axel_time = millis();
nosleep = 0;
}
}
}
if (buttIntStatus == PIN_BUTTON) {
if (digitalRead(PIN_BUTTON) == 0 && button_flag == 0) {
button_flag = 1;
previousMillis = millis();
ledsOff();
}
if (digitalRead(PIN_BUTTON) == 0 && button_flag == 1) {
if ((millis() - previousMillis > 0) && (millis() - previousMillis <= 1750)) {
if (millis() - lightMillisR > 70) {
lightMillisR = millis();
onoff = !onoff;
digitalWrite(BLUE_LED, onoff);
}
}
if ((millis() - previousMillis > 1750) && (millis() - previousMillis <= 2000)) {
ledsOff();
}
if ((millis() - previousMillis > 2000) && (millis() - previousMillis <= 3750)) {
if (millis() - lightMillisR > 50) {
lightMillisR = millis();
onoff = !onoff;
digitalWrite(GREEN_LED, onoff);
}
}
if ((millis() - previousMillis > 3750) && (millis() - previousMillis <= 4000)) {
ledsOff();
}
if ((millis() - previousMillis > 4000) && (millis() - previousMillis <= 5750)) {
if (millis() - lightMillisR > 30) {
lightMillisR = millis();
onoff = !onoff;
digitalWrite(RED_LED, onoff);
}
}
if (millis() - previousMillis > 5750) {
ledsOff();
}
}
if (digitalRead(PIN_BUTTON) == 1 && button_flag == 1) {
if ((millis() - previousMillis <= 1750) && (button_flag == 1))
{
ledsOff();
blinky(2, 2, BLUE_LED);
button_flag = 0;
buttIntStatus = 0;
presentation();
nosleep = 0;
}
if ((millis() - previousMillis > 2000) && (millis() - previousMillis <= 3750) && (button_flag == 1))
{
ledsOff();
blinky(2, 2, GREEN_LED);
configMode = 1;
button_flag = 0;
configMillis = millis();
interrupt_Init(1);
NRF_POWER->DCDCEN = 0;
buttIntStatus = 0;
NRF5_ESB_startListening();
wait(50);
}
if ((millis() - previousMillis > 4000) && (millis() - previousMillis <= 5750) && (button_flag == 1))
{
ledsOff();
blinky(3, 3, RED_LED);
//new_device();
}
if ((((millis() - previousMillis > 1750) && (millis() - previousMillis <= 2000)) || ((millis() - previousMillis > 3750) && (millis() - previousMillis <= 4000)) || ((millis() - previousMillis > 5750))) && (button_flag == 1))
{
ledsOff();
nosleep = 0;
button_flag = 0;
buttIntStatus = 0;
}
}
}
} else {
batteryVoltage = hwCPUVoltage();
BATT_TIME = SLEEP_TIME;
sendBatteryStatus(1);
nosleep = 0;
}
} else {
if (millis() - configMillis > 30000) {
blinky(3, 3, GREEN_LED);
configMode = 0;
nosleep = 0;
interrupt_Init(0);
NRF_POWER->DCDCEN = 1;
wait(50);
}
}
} else {
if (buttIntStatus == PIN_BUTTON) {
if (digitalRead(PIN_BUTTON) == 0 && button_flag == 0) {
button_flag = 1;
nosleep = 1;
previousMillis = millis();
ledsOff();
}
if (digitalRead(PIN_BUTTON) == 0 && button_flag == 1) {
if ((millis() - previousMillis > 0) && (millis() - previousMillis <= 1750)) {
if (millis() - lightMillisR > 25) {
lightMillisR = millis();
onoff = !onoff;
digitalWrite(GREEN_LED, onoff);
}
}
if ((millis() - previousMillis > 1750) && (millis() - previousMillis <= 2000)) {
ledsOff();
}
if ((millis() - previousMillis > 2000) && (millis() - previousMillis <= 4000)) {
if (millis() - lightMillisR > 25) {
lightMillisR = millis();
onoff = !onoff;
digitalWrite(RED_LED, onoff);
}
}
if (millis() - previousMillis > 4000) {
ledsOff();
}
}
if (digitalRead(PIN_BUTTON) == 1 && button_flag == 1) {
if ((millis() - previousMillis <= 1750) && (button_flag == 1))
{
ledsOff();
blinky(2, 2, BLUE_LED);
button_flag = 0;
buttIntStatus = 0;
check_parent();
nosleep = 0;
}
if ((millis() - previousMillis > 2000) && (millis() - previousMillis <= 4000) && (button_flag == 1))
{
ledsOff();
blinky(3, 3, RED_LED);
//new_device();
}
if ((((millis() - previousMillis > 1750) && (millis() - previousMillis <= 2000)) || ((millis() - previousMillis > 4000))) && (button_flag == 1))
{
ledsOff();
nosleep = 0;
button_flag = 0;
buttIntStatus = 0;
}
}
} else {
check_parent();
}
}
}
if (_transportSM.failureCounter > 0)
{
_transportConfig.parentNodeId = loadState(101);
_transportConfig.nodeId = myid;
_transportConfig.distanceGW = loadState(103);
mypar = _transportConfig.parentNodeId;
nosleep = 0;
flag_fcount = 1;
err_delivery_beat = 6;
happy_node_mode();
gateway_fail();
}
if (nosleep == 0) {
oldmillis = millis();
axelIntStatus = 0;
buttIntStatus = 0;
gerkIntStatus = 0;
magIntStatus = 0;
sleep(SLEEP_TIME_W, false);
nosleep = 1;
}
}
void blinky(uint8_t pulses, uint8_t repit, uint8_t ledColor) {
for (int x = 0; x < repit; x++) {
if (x > 0) {
wait(150);
}
for (int i = 0; i < pulses; i++) {
if (i > 0) {
wait(40);
}
digitalWrite(ledColor, LOW);
wait(10);
digitalWrite(ledColor, HIGH);
}
}
}
void board_Init() {
pinMode(PIN_BUTTON, INPUT_PULLUP);
pinMode(MAGNET_INT, INPUT);
pinMode(GERKON_INT, INPUT);
pinMode(AXEL_INT, INPUT);
pinMode(RED_LED, OUTPUT);
pinMode(GREEN_LED, OUTPUT);
pinMode(BLUE_LED, OUTPUT);
ledsOff();
NRF_POWER->DCDCEN = 1;
wait(5);
#ifndef MY_DEBUG
NRF_UART0->ENABLE = 0;
wait(5);
#endif
//NRF_NFCT->TASKS_DISABLE = 1;
// NRF_NVMC->CONFIG = 1;
// NRF_UICR->NFCPINS = 0;
// NRF_NVMC->CONFIG = 0;
// NRF_SAADC ->ENABLE = 0;
// NRF_PWM0 ->ENABLE = 0;
// NRF_PWM1 ->ENABLE = 0;
// NRF_PWM2 ->ENABLE = 0;
// NRF_TWIM1 ->ENABLE = 0;
// NRF_TWIS1 ->ENABLE = 0;
NRF_RADIO->TXPOWER = 8;
wait(5);
conf_vibro_set = loadState(230);
if ((conf_vibro_set > 5) || (conf_vibro_set == 0)) {
conf_vibro_set = 2;
saveState(230, conf_vibro_set);
}
blinky(1, 1, BLUE_LED);
}
void ledsOff() {
digitalWrite(RED_LED, HIGH);
digitalWrite(GREEN_LED, HIGH);
digitalWrite(BLUE_LED, HIGH);
}
void happy_init() {
//hwWriteConfig(EEPROM_NODE_ID_ADDRESS, 255); // ******************** checking the node config reset *************************
if (hwReadConfig(EEPROM_NODE_ID_ADDRESS) == 0) {
hwWriteConfig(EEPROM_NODE_ID_ADDRESS, 255);
}
if (loadState(100) == 0) {
saveState(100, 255);
}
CORE_DEBUG(PSTR("EEPROM NODE ID: %d\n"), hwReadConfig(EEPROM_NODE_ID_ADDRESS));
CORE_DEBUG(PSTR("USER MEMORY SECTOR NODE ID: %d\n"), loadState(100));
if (hwReadConfig(EEPROM_NODE_ID_ADDRESS) == 255) {
mtwr = 0;
} else {
mtwr = 11000;
no_present();
}
CORE_DEBUG(PSTR("MY_TRANSPORT_WAIT_MS: %d\n"), mtwr);
}
void no_present() {
_coreConfig.presentationSent = true;
_coreConfig.nodeRegistered = true;
}
void interrupt_Init(bool start) {
//***
//SET
//NRF_GPIO_PIN_NOPULL
//NRF_GPIO_PIN_PULLUP
//NRF_GPIO_PIN_PULLDOWN
//***
nrf_gpio_cfg_input(PIN_BUTTON, NRF_GPIO_PIN_PULLUP);
nrf_gpio_cfg_input(AXEL_INT, NRF_GPIO_PIN_NOPULL);
nrf_gpio_cfg_input(GERKON_INT, NRF_GPIO_PIN_NOPULL);
nrf_gpio_cfg_input(MAGNET_INT, NRF_GPIO_PIN_NOPULL);
APP_GPIOTE_INIT(APP_GPIOTE_MAX_USERS);
PIN_BUTTON_MASK = 1 << PIN_BUTTON;
AXEL_INT_MASK = 1 << AXEL_INT;
GERKON_INT_MASK = 1 << GERKON_INT;
MAGNET_INT_MASK = 1 << MAGNET_INT;
// app_gpiote_user_register(p_user_id, pins_low_to_high_mask, pins_high_to_low_mask, event_handler)
if (start == 0) {
app_gpiote_user_register(&m_gpiote_user_id, AXEL_INT_MASK | GERKON_INT_MASK, GERKON_INT_MASK | MAGNET_INT_MASK | PIN_BUTTON_MASK, gpiote_event_handler);
wait(5);
} else if (start == 1) {
app_gpiote_user_register(&m_gpiote_user_id, GERKON_INT_MASK, GERKON_INT_MASK | MAGNET_INT_MASK | PIN_BUTTON_MASK, gpiote_event_handler);
wait(5);
}
app_gpiote_user_enable(m_gpiote_user_id);
wait(5);
axelIntStatus = 0;
buttIntStatus = 0;
gerkIntStatus = 0;
magIntStatus = 0;
}
void gpiote_event_handler(uint32_t event_pins_low_to_high, uint32_t event_pins_high_to_low)
{
MY_HW_RTC->CC[0] = (MY_HW_RTC->COUNTER + 2); // Taken from d0016 example code, ends the sleep delay
if (PIN_BUTTON_MASK & event_pins_high_to_low) {
if ((buttIntStatus == 0) && (axelIntStatus == 0) && (gerkIntStatus == 0) && (magIntStatus == 0)) {
buttIntStatus = PIN_BUTTON;
}
}
if (flag_nogateway_mode == 0) {
if (AXEL_INT_MASK & event_pins_low_to_high) {
if ((axelIntStatus == 0) && (buttIntStatus == 0) && (gerkIntStatus == 0) && (magIntStatus == 0) && (door_status == 1)) {
axelIntStatus = AXEL_INT;
axel_time0 = millis();
}
}
if ((GERKON_INT_MASK & event_pins_low_to_high) || (GERKON_INT_MASK & event_pins_high_to_low)) {
if ((axelIntStatus == 0) && (buttIntStatus == 0) && (gerkIntStatus == 0) && (magIntStatus == 0)) {
gerkIntStatus = GERKON_INT;
}
}
if (MAGNET_INT_MASK & event_pins_high_to_low) {
if ((axelIntStatus == 0) && (buttIntStatus == 0) && (gerkIntStatus == 0) && (magIntStatus == 0) && (door_status == 1)) {
magIntStatus = MAGNET_INT;
}
}
}
}
void sensors_Init() {
Wire.begin();
wait(100);
lis2 = new LIS2DW12Sensor (&Wire);
vibro_Init();
if (flag_nogateway_mode == 0) {
if (digitalRead(GERKON_INT) == HIGH) {
door_status = 1;
interrupt_Init(0);
} else {
door_status = 0;
interrupt_Init(1);
}
send(dwsMsg.set(door_status));
wait(50);
SLEEP_TIME_W = SLEEP_TIME;
axelIntStatus = 0;
buttIntStatus = 0;
gerkIntStatus = 0;
magIntStatus = 0;
sendBatteryStatus(0);
wait(100);
blinky(2, 1, BLUE_LED);
wait(100);
blinky(2, 1, GREEN_LED);
wait(100);
blinky(2, 1, RED_LED);
axel_time = millis();
} else {
interrupt_Init(0);
blinky(5, 3, RED_LED);
}
}
void config_Happy_node() {
if (mtwr == 0) {
myid = getNodeId();
saveState(100, myid);
mypar = _transportConfig.parentNodeId;
old_mypar = mypar;
saveState(101, mypar);
saveState(102, _transportConfig.distanceGW);
}
if (mtwr != 0) {
myid = getNodeId();
if (myid != loadState(100)) {
saveState(100, myid);
}
if (isTransportReady() == true) {
mypar = _transportConfig.parentNodeId;
if (mypar != loadState(101)) {
saveState(101, mypar);
}
if (_transportConfig.distanceGW != loadState(102)) {
saveState(102, _transportConfig.distanceGW);
}
present_only_parent();
}
if (isTransportReady() == false)
{
no_present();
flag_fcount = 1;
err_delivery_beat = 6;
_transportConfig.nodeId = myid;
_transportConfig.parentNodeId = loadState(101);
_transportConfig.distanceGW = loadState(102);
mypar = _transportConfig.parentNodeId;
happy_node_mode();
gateway_fail();
}
}
}
void send_Axel() {
if (millis() - axel_time >= 5000) {
blinky(2, 1, GREEN_LED);
blinky(2, 1, RED_LED);
blinky(2, 1, GREEN_LED);
blinky(2, 1, RED_LED);
blinky(2, 1, GREEN_LED);
blinky(2, 1, RED_LED);
send_a = send(vibroMsg.set(vibro));
wait(50);
if (send_a == false) {
send_a = send(vibroMsg.set(vibro));
wait(100);
}
if (send_a == true) {
err_delivery_beat = 0;
if (flag_nogateway_mode == 1) {
flag_nogateway_mode = 0;
CORE_DEBUG(PSTR("MyS: NORMAL GATEWAY MODE\n"));
err_delivery_beat = 0;
}
} else {
_transportSM.failedUplinkTransmissions = 0;
if (err_delivery_beat < 6) {
err_delivery_beat++;
}
if (err_delivery_beat == 5) {
if (flag_nogateway_mode == 0) {
gateway_fail();
CORE_DEBUG(PSTR("MyS: LOST GATEWAY MODE\n"));
}
}
}
axel_time = millis();
axelIntStatus = 0;
nosleep = 0;
} else {
axelIntStatus = 0;
nosleep = 0;
}
}
void send_Gerkon() {
if (digitalRead(GERKON_INT) == HIGH) {
door_status = 1;
interrupt_Init(0);
} else {
door_status = 0;
interrupt_Init(1);
}
if (door_status == 1) {
blinky(1, 1, GREEN_LED);
} else {
blinky(1, 1, RED_LED);
}
send_a = send(dwsMsg.set(door_status));
wait(50);
if (send_a == false) {
send_a = send(dwsMsg.set(door_status));
wait(100);
if (send_a == false) {
send_a = send(dwsMsg.set(door_status));
wait(150);
}
}
if (send_a == true) {
err_delivery_beat = 0;
if (flag_nogateway_mode == 1) {
flag_nogateway_mode = 0;
CORE_DEBUG(PSTR("MyS: NORMAL GATEWAY MODE\n"));
err_delivery_beat = 0;
}
} else {
_transportSM.failedUplinkTransmissions = 0;
if (err_delivery_beat < 6) {
err_delivery_beat++;
}
if (err_delivery_beat == 5) {
if (flag_nogateway_mode == 0) {
gateway_fail();
CORE_DEBUG(PSTR("MyS: LOST GATEWAY MODE\n"));
}
}
}
gerkIntStatus = 0;
nosleep = 0;
}
void send_Magnet() {
blinky(2, 1, BLUE_LED);
blinky(2, 1, RED_LED);
blinky(2, 1, BLUE_LED);
blinky(2, 1, RED_LED);
blinky(2, 1, BLUE_LED);
blinky(2, 1, RED_LED);
send_a = send(mMsg.set(magnet_status));
wait(50);
if (send_a == false) {
send_a = send(mMsg.set(magnet_status));
wait(100);
}
if (send_a == true) {
err_delivery_beat = 0;
if (flag_nogateway_mode == 1) {
flag_nogateway_mode = 0;
CORE_DEBUG(PSTR("MyS: NORMAL GATEWAY MODE\n"));
err_delivery_beat = 0;
}
} else {
_transportSM.failedUplinkTransmissions = 0;
if (err_delivery_beat < 6) {
err_delivery_beat++;
}
if (err_delivery_beat == 5) {
if (flag_nogateway_mode == 0) {
gateway_fail();
CORE_DEBUG(PSTR("MyS: LOST GATEWAY MODE\n"));
}
}
}
magIntStatus = 0;
nosleep = 0;
}
void new_device() {
hwWriteConfig(EEPROM_NODE_ID_ADDRESS, 255);
saveState(100, 255);
wdt_enable(WDTO_15MS);
}
void update_Happy_transport() {
CORE_DEBUG(PSTR("MyS: UPDATE TRANSPORT CONFIGURATION\n"));
mypar = _transportConfig.parentNodeId;
if (mypar != loadState(101))
{
saveState(101, mypar);
}
if (_transportConfig.distanceGW != loadState(102))
{
saveState(102, _transportConfig.distanceGW);
}
present_only_parent();
wait(50);
nosleep = 0;
flag_update_transport_param = 0;
}
void present_only_parent() {
if (old_mypar != mypar) {
CORE_DEBUG(PSTR("MyS: SEND LITTLE PRESENT:) WITH PARENT ID\n"));
if (_sendRoute(build(_msgTmp, 0, NODE_SENSOR_ID, C_INTERNAL, 6).set(mypar))) {
flag_sendRoute_parent = 0;
old_mypar = mypar;
} else {
flag_sendRoute_parent = 1;
}
}
}
void happy_node_mode() {
_transportSM.findingParentNode = false;
_transportSM.transportActive = true;
_transportSM.uplinkOk = true;
_transportSM.pingActive = false;
_transportSM.failureCounter = 0;
_transportSM.uplinkOk = true;
_transportSM.failureCounter = 0u;
_transportSM.failedUplinkTransmissions = 0u;
transportSwitchSM(stReady);
CORE_DEBUG(PSTR("TRANSPORT: %d\n"), isTransportReady());
}
void gateway_fail() {
flag_nogateway_mode = 1;
flag_update_transport_param = 0;
SLEEP_TIME_W = SLEEP_NOGW;
}
void check_parent() {
_transportSM.findingParentNode = true;
CORE_DEBUG(PSTR("MyS: SEND FIND PARENT REQUEST, WAIT RESPONSE\n"));
_sendRoute(build(_msg, 255, NODE_SENSOR_ID, C_INTERNAL, 7).set(""));
wait(1500, C_INTERNAL, 8);
if (_msg.sensor == 255) {
if (mGetCommand(_msg) == 3) {
if (_msg.type == 8) {
Ack_FP = 1;
CORE_DEBUG(PSTR("MyS: PARENT RESPONSE FOUND\n"));
}
}
}
if (Ack_FP == 1) {
CORE_DEBUG(PSTR("MyS: FIND PARENT PROCESS\n"));
Ack_FP = 0;
transportSwitchSM(stParent);
flag_nogateway_mode = 0;
flag_find_parent_process = 1;
problem_mode_count = 0;
} else {
_transportSM.findingParentNode = false;
CORE_DEBUG(PSTR("MyS: PARENT RESPONSE NOT FOUND\n"));
_transportSM.failedUplinkTransmissions = 0;
CORE_DEBUG(PSTR("TRANSPORT: %d\n"), isTransportReady());
nosleep = 0;
if (problem_mode_count < 9) {
CORE_DEBUG(PSTR("PROBLEM MODE COUNTER: %d\n"), problem_mode_count);
problem_mode_count++;
SLEEP_TIME_W = SLEEP_TIME_W + SLEEP_TIME_W;
}
}
}
void find_parent_process() {
flag_update_transport_param = 1;
flag_find_parent_process = 0;
CORE_DEBUG(PSTR("MyS: STANDART TRANSPORT MODE IS RESTORED\n"));
err_delivery_beat = 0;
SLEEP_TIME_W = SLEEP_TIME;
nosleep = 0;
}
void sendBatteryStatus(bool start) {
batt_cap = battery_level_in_percent(batteryVoltage);
if (start == 1) {
//if (batt_cap < old_batt_cap) {
sendBatteryLevel(battery_level_in_percent(batteryVoltage), 1);
wait(1500, C_INTERNAL, I_BATTERY_LEVEL);
old_batt_cap = batt_cap;
// }
} else {
sendBatteryLevel(battery_level_in_percent(batteryVoltage), 1);
wait(1500, C_INTERNAL, I_BATTERY_LEVEL);
}
linkQuality = calculationRxQuality();
if (linkQuality != old_linkQuality) {
wait(10);
sendSignalStrength(linkQuality);
wait(50);
old_linkQuality = linkQuality;
}
}
bool sendSignalStrength(const int16_t level, const bool ack)
{
return _sendRoute(build(_msgTmp, GATEWAY_ADDRESS, SIGNAL_Q_ID, C_SET, V_VAR1,
ack).set(level));
}
int16_t calculationRxQuality() {
int16_t nRFRSSI_temp = transportGetReceivingRSSI();
int16_t nRFRSSI = map(nRFRSSI_temp, -85, -40, 0, 100);
if (nRFRSSI < 0) {
nRFRSSI = 0;
}
if (nRFRSSI > 100) {
nRFRSSI = 100;
}
return nRFRSSI;
}
void receive(const MyMessage & message)
{
if (message.sensor == LEVEL_SENSIV_V_SENS_CHILD_ID) {
if (message.type == V_VAR1) {
conf_vibro_set = message.getByte();
vibro_Init();
saveState(230, conf_vibro_set);
wait(200);
send(conf_vsensMsg.set(conf_vibro_set));
wait(200);
blinky(3, 3, GREEN_LED);
configMode = 0;
nosleep = 0;
}
}
}
void vibro_Init() {
if (conf_vibro_set == 1) {
lis2->ODRTEMP = ODR_1Hz6_LP_ONLY;
}
if (conf_vibro_set == 2) {
lis2->ODRTEMP = ODR_12Hz5;
}
if (conf_vibro_set == 3) {
lis2->ODRTEMP = ODR_25Hz;
}
if (conf_vibro_set == 4) {
lis2->ODRTEMP = ODR_100Hz;
}
if (conf_vibro_set == 5) {
lis2->ODRTEMP = ODR_200Hz;
}
lis2->Enable_X();
wait(100);
lis2->Enable_Wake_Up_Detection();
wait(100);
}
Полный список файлов проекта доступен на гите
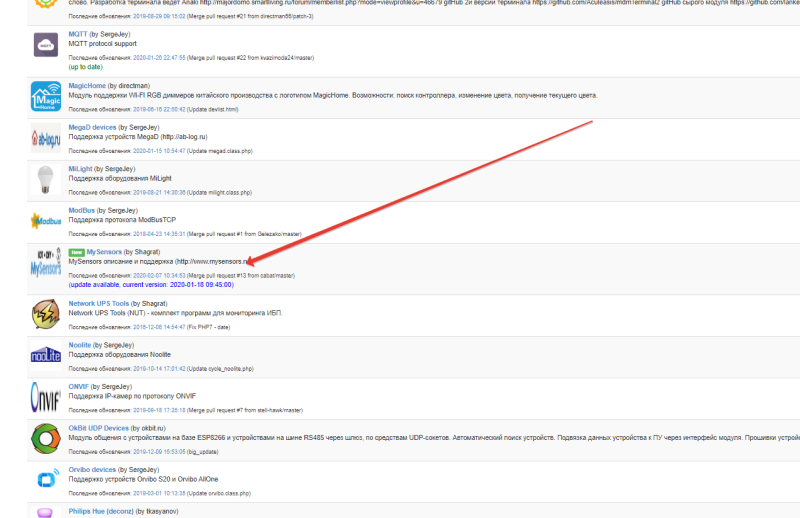
В качестве системы УД я уже давно использую Мажордомо. В данной статье буду описывать пример работы датчика в сети Майсенсорс через контроллер УД. В таком варианте данные с датчика отправляются через шлюз Майсенсорс в систему УД. В Мажордомо реализованна поддержка протокола Майсенсорс в отдельном модуле. Модуль для скачивания и установки доступен в маркете дополнений системы УД в разделе «оборудование».
На данный момент реализация для УД Мажордомо наиболее полная, поддерживается:
- все типы данных майсенсорс,
- работа с OTA,
- работа сразу с несколькими сетями в одном модуле(мультгейтовость),
- поддержка SmartSleep девайсов,
- запрос данных у датчиков в сети при старте модуля,
- запрос подтверждений доставки сообщений,
- поддержка сервисных запросов, таких как сбор данных, heartbeat, презентация, перезагрузка,
- работа с NodeManager
Есть конечно и недостатки, добавленная ранее поддержка serial шлюзов, в процессе естественного развития системы Мажордомо приказала долго жить и в данный момент не поддерживается. Мне этот тип гейтов даже не довелось потестировать в Мажордомо так как эта возможность стала недоступна раньше чем я узнал о Майсенсорс. Разработчик модуля обещал добавить снова эту возможность к сентябрю 2019 года, но осень 19-го прошла, а поддержки сериал шлюзов все еще нет :(.
Так же с Мажордомо можно использовать mqtt шлюзы Майсенсорс но уже не через модуль Майсенсорс, а через MQTT модуль.
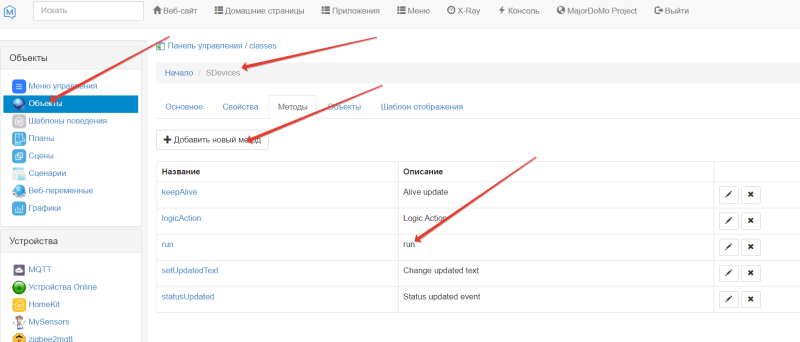
В моем датчике сенсоры удара и магнитного поля передают только единицу при срабатывании и это оказалось небольшой проблемой. Модуль «Простые устройсва» не поддерживает такие типы датчиков, есть конечно — общий датчик, но его кастомизация настроек сильно ограничена. При добавлении датчика неудобная проблемка заключалась в том что когда приходила очередная единичка с датчика мне нужно было запускать обратный таймер, что бы через интервал времени указанном в таймере в свойство объекта записывался ноль. Но так как всё работает через метод — «статус апдейт», то записывая ноль модуль майсенсорс получая новое состояние отправлял сообщение в сеть с этими данными на мой девайс, а смысла в этом ноль. Самым простым решением мне показалось добавить новый метод в котором будет передаватся сосотояние из свойства1 в свойство2 и запускатся таймер для записи в свойство2 ноля. Объект созданный в простых устройствах будет работать с свойством2, а в модуле Майсенсорс с свойством1.
if($this->getProperty('value2') == '1'){
$this->setProperty('status','1');
}
Далее в метод статус апдейт нужного объекта необходимо добавить запуск таймера:
if (gg("MysensorsSmoke03.status") == "1") {
SetTimeOut('AlarmShock','sg("MysensorsSmoke03.status","0");',10);
}
Видео с работой датчика в системе Majordomo и приложении Majordroid. Рекомендую посмотреть там по возможности показал работу основного функционала, ну и конечно ваши лайки и подписка будет особо бесценна для моего маленького домашнего канала, ну а нажав на колокольчик вы не пропустите видео с моими новыми датчиками ;).
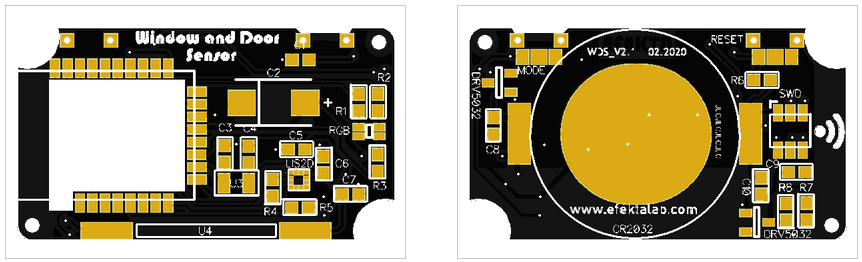
Плата девайса была сделана с помощью программы ДипТрейс. Освоение этого редактора для разработки электроники когда то позволило сильно расширить мои возможности. Замечу что я не являюсь профессиональным электронщиком, мой стаж в домашней разработке плат года полтора-два. Всем кто делает свои устройства на макетных платах рекомендую попробовать освоить какой-нибудь редактор, ютуб полон видеомануалов.
Поддержка чипов nRF5 в Майсенсорс реализована на базе билиотеки Sandeep Mistry — arduino-nRF5. Но в этой бибилтотеке отсутствует поддержка чипов nRF52840, nRF52810 и совсем новых чипов nRF52811. Пришлось сделать форк и добавить поддержку для этих чипов, был сделан перенос и адаптация из SDK Nordic. Отсутствовала поддержка софтдевайс так как особой необходимости используя Майсенсорс в этом нет, и небыло поддержки Порта1 для чипов nRF52840. Совсем недавно были объеденены мои изыскания на эту тему и изыскания еще одного участника сообщества Майсенсорс и в итоге получилась поддержка nRF52840 уже с портом1, доступных пинов стало просто море.
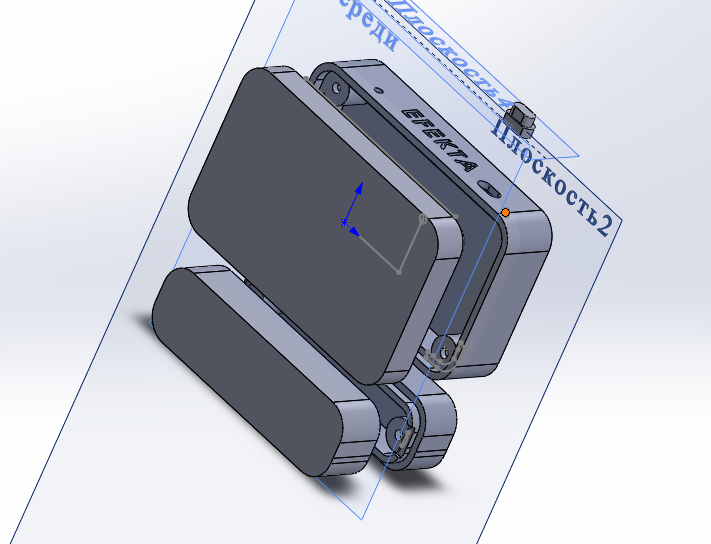
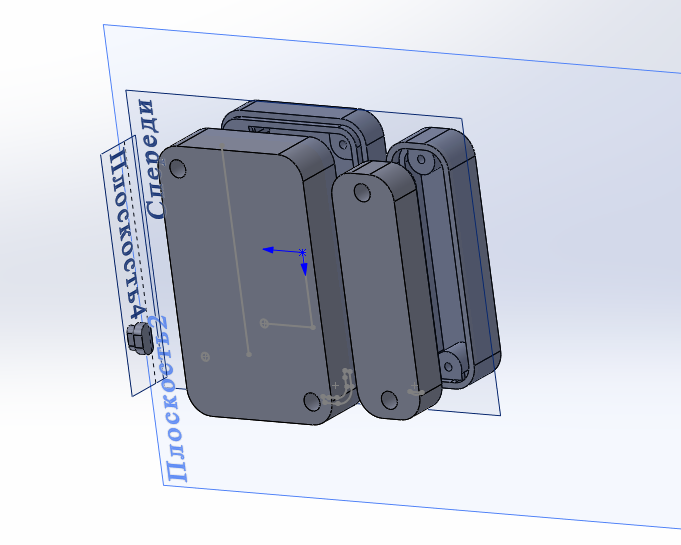
Корпус для датчика разрабатывался в программе СолидВоркс, его тоже осваивал самостоятельно по урокам на Ютуб примерно год назад. Корпус был напечатан на SLA принтере ANYCUBIC FOTON. Качество и точность печати меня очень устраивает. Единственный минус это довольно бедный выбор УФ смол с которыми такие бытовые принтеры могут работать. Размеры устройства в корпусе: Длинна 43мм, Ширина 26мм, Высота 12.5мм. Размеры корпуса с магнитом: Длинна 37мм, Ширина 11мм, Высота 12,5мм.
Потребление датчика во сне составило от 4мкА до 7мкА, в зависимости от выбранного чипа. Потребление в режиме передачи данных составило 8мА.
В датчике используется батарейка CR2032. Все замеры производились китайским «мультифайлером» :) в виду отсутствия профайлера из за его довольно немаленькой стоимости :(.
Устройство можно повторить, воспользоваться написанным скетчем или написать свой. Для повторения датчика, все необходимое выложено на моем Гитхабе (гербер, код, модели корпусов).
Если кто то готов оказать помощь в написании ПО под протокол ZIGBEE, с радостью посотрудничаю.
Если вас заинтересовал данный проект, заходите в группу телеграмм, там всегда будет оказана помощь в освоении уже не только протокола Майсенсорс, но и Zigbee и BLE на nRF5, оперативно проконсультируют по всем вопросам по программированию nRF52 в Ардуино ИДЕ и не только в ней.
ТЕЛЕГРАМ ЧАТ ГДЕ ОБИТАЮ Я И ТАКИЕ КАК Я — @MYSENSORS_RUS.
Всем добра!
Комментариев нет:
Отправить комментарий