30 ноября 2019 года в Москве прошёл 2-й ROS Russian MeetUp, организатор — Лаборатория робототехники Сбербанка, — на котором большее 200 ROS-любителей поделились своим опытом и знаниями.
Мы продолжаем публиковать наиболее интересные доклады: в этом материале вы можете познакомиться с подборкой выступлений про учебных роботов. Эта область деятельности существует с самого начала появления робототехники как инженерного направления, и сейчас мы наблюдаем его качественное развитие силами российского ROS-сообщества.
Итак, поехали!
Образовательный робот TurtleBro
Автор доклада: Роман Щербов
Слайды презентации
Краткое вступление от докладчика:
Приветствую, меня зовут Роман Щербов, я работаю в компании VoltBro, мы занимается инженерно-робототехническим образованием. Если коротко, то делаем образовательные наборы ракет и проводим ракетостроительные соревнования, делаем образовательных роботов и преподаем робототехнику в вузах и немного в школах.
Сейчас в России складывается следующая ситуация с инженерно-техническим образованием — есть много кружков робототехники, которые я могу условно разделить на две большие группы:
- Лего-ориентированные кружки, где учащимся дают самые базовые навыки по алгоритмическому программированию роботов и самые элементарные навыки конструирования. По большому счёту к робототехнике это имеет очень отдаленное отношение.
- Arduino + 3D-принтинг + элементарная пайка. Это уже ближе к робототехнике, но всё равно ещё далеко от настоящих проблем, с которыми сталкиваются инженеры, работающие в отрасли.
В вузах же (за исключением единичных случаев), которые представляются следующей ступенью, по факту отсутствует преподавание робототехники. Т.е. есть много предметов, которые неплохи для общего понимания задач робототехники и инженерии, например, ТАУ, АСУ, и прочие прекрасные матаны с линейками и ТФКП, но их явно недостаточно ввиду отрыва опыта и методических материалов, по которым они преподаются, от реальных задач. Проанализировав эту ситуацию, мы решили заполнить этот пробел между начальными кружковыми навыками, базовой вузовской теорией и производственной реальностью, выпустив наш учебно-методический комплекс “TurtleBro”.
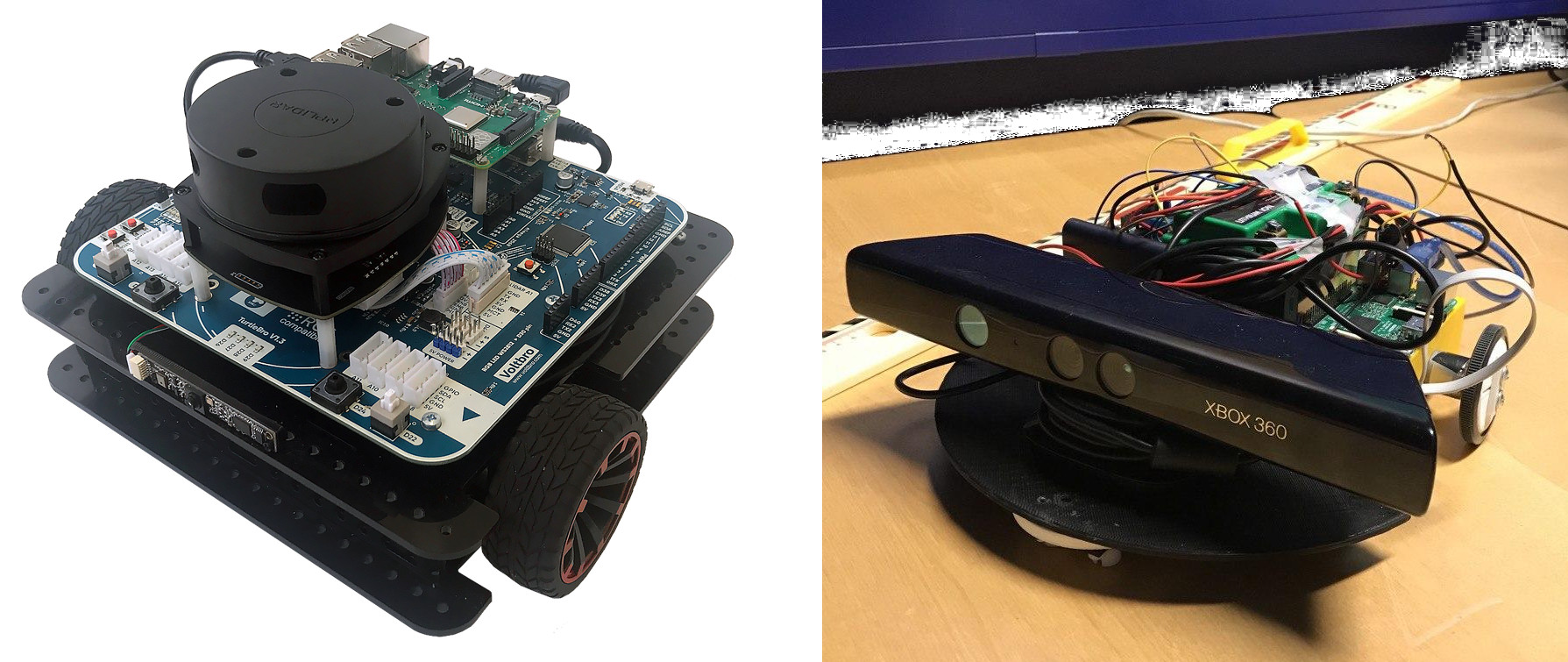
Так исторически сложилось, что большинство роботов, обучающих ROS, называют черепахами, да и собственно маскот ROS это черепаха. Ну мы, собственно, тоже долго не думали. На разработку прототипа ушло примерно полгода. И еще полгода на допиливание напильником и написание и/или адаптацию ROS-пакетов. И сейчас у нас есть полностью ROS-совместимый робот, с автономной навигацией и компьютерным зрением, взаимодействующий с некоторыми базовыми облачными сервисами (Yandex и Google привет!), отдающий свою телеметрию и одометрию и многое другое и по сути являющийся материальным Python/Cpp объектом в реальном мире.
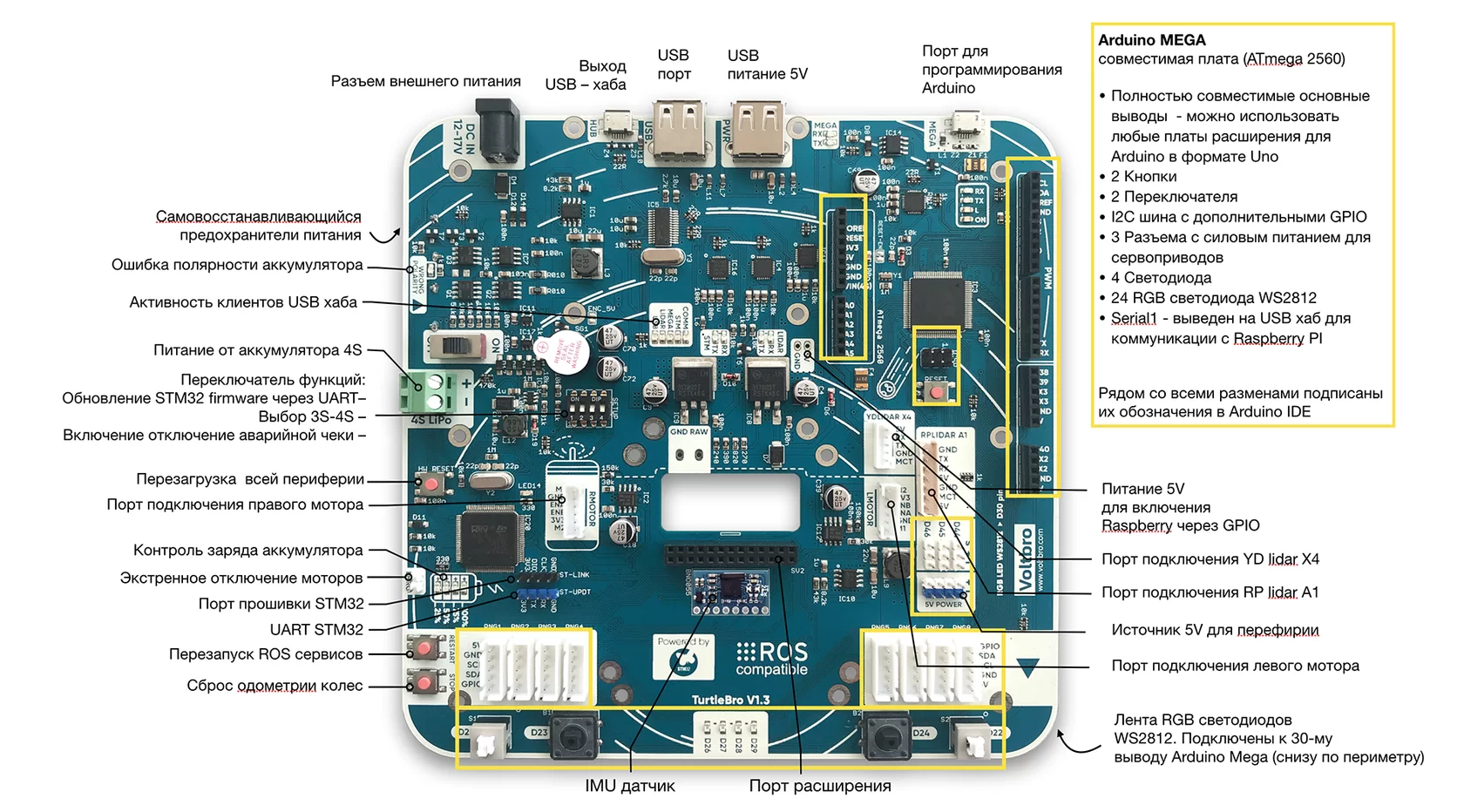
Для реализации этой концепции мы спроектировали плату нашего робота, на которой разместили контроллер STM 32, который отвечает за управление дифференциальным приводом, распределением питания, поддерживает ROS-публикацию телеметрии и одометрии и т.п. Ну и для того, чтобы переход к серьёзной робототехнике от кружков Arduino был менее болезненным. мы встроили в нашу плату управления несколько нажимных переключателей, разъёмов управления внешними DIY-сервоприводами и контроллер совместимый с Arduino Mega, который через интегрированный USB-хаб может взаимодействовать с Raspberry Pi, на котором крутится ROS и все управляющие пакеты верхнего уровня. При этом, несмотря на то, что Raspberri и Arduino являются независимыми, пакет ROS-serial позволяет передавать управляющее воздействие в обе стороны, т.е. нажатие кнопки, подключенной к Arduino, может вызывать публикацию в топик ROS, и наоборот, передача сообщения правильного формата в топик ROS, может, например, сдвигать сервопривод на нужный угол.
На этом роботе мы проводим обучение робототехнике, например в МГУ (и не только), и проводим несколько всероссийских соревнований по робототехнике, к примеру профиль Олимпиады НТИ — “Аэрокосмические системы” и компетенцию WorldSkills “Эксплуатация сервисных роботов”. А также поддерживаем некоторые опенсорсные проекты для робототехников — https://github.com/voltbro.
Подробнее про нас, наши мероприятия и наших роботов тут.
Доступный автономный мобильный робот на базе ROS и SLAM
Автор доклада: Кузин Сергей Олегович
Слайды презентации
В материале описывается процесс разработки недорогого мобильного робота на основе платформы Arduino и Robot Operating System для выполнения автономной навигации. Доклад содержит обзор структуры операционной системы робота, принципов работы и применения к реальным мобильным роботам. В то же время рассмотрена теория одновременной локализации и картирования (Simultaneous Localization and Mapping (SLAM)) и возможности её реализации на практике. Практическая часть содержит описание процесса создания мобильного робота с дифференциальным приводом, создание дистанционного управления и процесс полной интеграции операционной системы с роботом для самостоятельной локализации, картографирования в помещениях и автономной навигации.
Заключение
Совсем скоро, 18 апреля, состоится очередной ROS MeetUp, ещё более масштабный и интересный! Мы пока не знаем, как будет развиваться эпидемиологическая ситуация и проводим его в формате вебинара, а showcase переносим на осень, но взамен мы организуем конкурс open-source пакетов на ROS! Приглашаем всех коллег присутствовать в качестве слушателей, спикеров и участников конкурса. Участие бесплатное, количество мест ограничено, регистрироваться тут. И напоминаем, что найти единомышленников по разработке на ROS в России, узнать последние ROS-новости можно в нашем телеграм-канале ROS Russia community.
Если вам интересна разработка роботов, робототехнических модулей или программных компонентов, вы хотите показать свои разработки или просто пообщаться с единомышленниками,— добро пожаловать на наш следующий ROS Meetup который пройдет 18 апреля в онлайн формате!
Комментариев нет:
Отправить комментарий