Содержание
Магия — это могия. Кто могёт, тот и Маг!
Александр Шевцов
Магия и культура в науке управления
Введение

Рассуждая о роботах, не упомянуть такое «наше всё» в робототехнике как компания Boston Dynamics — это ведь как-то… непрофессионально, да? Но и говорить о ней профессионально уже не так-то просто (а в двух словах точно не получится), в силу приобретённой компанией широкой известности и рождённых этой известностью стереотипов, сложившихся в среде неспециалистов, в частности, неанглоязычных. И всё же, будем вести речь именно с профессиональной точки зрения, по возможности, минимально отвлекаясь на шумиху и домыслы. Ну… разве что несколько слов о стереотипах… а дальше — только профессионально!
Сразу предупреждаю: под катом очень много букв. Будьте осторожны, чтобы не завалило!
О стереотипах
Приведём некоторые суждения, с которыми доводилось сталкиваться применительно к разработкам Boston Dynamics. Как водится в случаях, когда тему обсуждают неспециалисты, эти суждения максимально упрощены и категоричны:
- Boston Dynamics — это прорыв в области робототехники и искусственного интеллекта. Скоро роботы станут полностью подобны человеку. Наступает эра интеллектуальных роботов! «Приключения Электроника», «Двухсотлетний человек» и всё такое.
- Скоро роботы станут полностью подобны человеку. Тогда они смогут обходиться без нас и поднимут восстание / уничтожат человечество / займут наши рабочие места (выбирать по вкусу)! «Терминатор», «Я, робот», «кожаные ублюдки» и всё такое.
- Наши, отечественные роботы в подмётки не годятся иностранным. «Сияющий град на холме» вновь продемонстрировал миру идеальную общественную систему, которая единственная создаёт всё самое лучшее в мире!
- Роботы Boston Dynamics — это имитация. На самом деле, они ничего не могут, а опубликованные видеоролики — это то ли 3D-графика, то ли копирование роботами записанных движений человека.
Робот Atlas
Конечно, все эти утверждения очень наивны. Каждое из них отражает собственные мечты или страхи произносящего их в предельно упрощённом виде и имеет мало отношения, собственно, к технике. Техника же здесь выступает лишь средством обоснования своей позиции.
Неправильно требовать, скажем, от психологов, юристов или бухгалтеров знаний по теории и практике робототехники. В конце концов, у них есть своя работа, которой они посвящают всё своё время, и они не обязаны разбираться в технических тонкостях. Но мы инженеры. Так что давайте воспользуемся этими разнонаправленными догмами в качестве отправной точки, чтобы вернуться из мира эмоций в мир техники. И тогда мы увидим, что с Boston Dynamics «всё сложно», а потому совсем не так, как представлено в этих утверждениях. Для начала — коротко, а далее будет подробнее. Ну, что, рванём покровы?
- Роботы Boston Dynamics — это очень качественно (даже так: на пять с плюсом) выполненные проекты, демонстрирующие современный, сегодняшний уровень технологий из разных областей техники, объединённых в едином устройстве. А раз сегодняшний уровень, то и прорывом их называть затруднительно. Что до искусственного интеллекта, то и сами разработчики честно признают недостаток «интеллектуальности» своих роботов. Но запомним: пять с плюсом.
- Ох уж этот так называемый «искусственный интеллект»! Надо бы написать отдельную статью про него. Роботы не могут и никогда не смогут делать всё, как человек. И в этом есть положительный аспект. Потому что они никогда не поднимут восстание (как и ваш автомобиль, холодильник или телефонный автоответчик). Не займут все рабочие места (хотя бы потому, что их тоже должен кто-то разрабатывать и обслуживать). И уж если в XIX в. мы пережили внедрение ткацких станков, то тем более переживём внедрение роботов в веке XXI-м.
- Почему-то русское национальное самокопание заставляет нас требовать от себя быть лучшими во всём. Вот непременно во всём, и без полутонов. А так в мире не бывает. Да, Boston Dynamics сейчас обошла российских разработчиков в шагающих роботах. Ну, так она и весь мир обошла, не только нас. Однако, если у России, например, самый большой и современный в мире ледокольный флот; если Росатом, по сути, сегодня уже единственный в мире способен проектировать и строить современные АЭС (а вот такие плавучие АЭС до нас вообще никто и никогда не строил); если современные российские комплексы вооружения на равных конкурируют с зарубежными аналогами на мировом рынке… То чего нам стесняться каких-то шагающих роботов? А вон немцы и японцы лучшие в автомобилестроении, станкостроении и промышленной робототехнике (хотя… и на эту тему ведь тоже можно спорить). А китайцы… Ну, и так далее.
- Нет, видеоролики от Boston Dynamics — это не имитация. Но и ничего сверъестественного роботы на них, и правда, не делают (повторим, речь о роликах именно от Boston Dynamics). Зато у американцев тоже всё в порядке с юмором, и подшутить над своими коллегами они очень любят. А тем, кто принял за чистую монету розыгрыши от «Bosstown Dynamics» (найдите отличия в написании), хочется пожелать: чаще улыбайтесь!
Про «Bosstown Dynamics» ещё скажем пару слов ниже, а пока для тренировки давайте попробуем отличить другой розыгрыш от настоящего робота:
На одном из этих роликов настоящий робот BigDog. На каком? Догадались?
О научно-технических прорывах, магии и подмётках
В прежние времена все люди знали, что среди них есть волшебники, а мир полон чудес. И никто в этом не сомневался. Кто же такой маг? Да кто могёт, тот и маг!
С тех пор в человеческом сознании ничего не изменилось. Поменялся только язык. Сегодня магию инженеры называют словами «наука», «технологии» и «производство». И, да, все инженеры-робототехники во всех странах понимают, как устроены и как работают роботы от Boston Dynamics. Но для остальных людей они — прорыв, чудо техники… в общем, магия. Ведь так хочется поверить, что кусок железа с пластиком, смешно балансирующий на двух опорах за счёт согласованного движения гидроцилиндров, которые перемещает перекачиваемое насосом масло в соответствии с изменяющимися управляющими напряжениями на выходе коробочки с электронными платами, где по заданному программистами закону скачут электромагнитные поля, гоняя электроны через полупроводниковые p-n-переходы, — он вдруг ожил и вот ну всё-всё понимает!
Если же мы присмотримся поближе к истории Boston Dynamics, то увидим… нет, не столько прорывы, сколько долгую, долгую, настойчивую, кропотливую, долгую… настойчивую… долгую работу. Начиная с созданной главой и вдохновителем компании Марком Рэйбертом в 1980 г. в Университете Карнеги — Меллона (Carnegie Mellon University, CMU) лаборатории Leg Lab, которая затем, в 1986 г. вслед за ним переехала в Массачусетский технологический институт (Massachusetts Institute of Technology, MIT).
Роботы лаборатории Leg Lab
Возможно, эти «Одноногий прыгун» (1983 – 1984 гг.), «Четвероног» (1984 – 1987 гг.), «Плоский двуног» (1985 – 1990 гг.) и «3-мерный двуног» (1989 – 1995 гг.), «Штатив» (1988 – 1989 гг.), «Уни-ру» — одноногий кенгуру (1991 – 1993 гг.), «Весенняя индейка» (1994 – 1996 гг.), «Дегенеробот» (1994 – 1995 гг.), «Краб» (с 1995 г.), «РобоП» (1996 – 1997 гг.), «Весенний фламинго» (1996 – 2000 гг.) показались вам смешными? Но именно они-то и были прорывом для своего времени! Ведь как раз в них уже тогда были воплощены мировые научные достижения в части алгоритмов поддержания равновесия шагающими и прыгающими роботами. Все результаты публиковались в статьях, защищались диссертации — по приведённым ссылкам всё это можно найти. Да и не только в Leg Lab занимались этим направлением. Весь научный мир (и в нашей стране тоже) увлечённо развивал теорию и практику управления шагающими и прыгающими механизмами.

Сотрудники Leg Lab. В центре в первом ряду — Марк Рэйберт
Я не случайно так долго перечислял этих робочудиков. Да и то, назвал не всех, над которыми работала лаборатория (как с Марком Рэйбертом, так и после его ухода из лаборатории в 1995 г.). Честное слово, я белой завистью завидую инженерам из Leg Lab / Boston Dynamics, которые имеют возможность вот уже четыре десятилетия (!) непрерывно работать и работать над тем, к чему они пришли. Тратить десятки миллионов долларов финансирования, которое лаборатория с 1980 г. получала от ARPA / DARPA и прочих военных на каждый из роботов, ни один (!) из которых так и не поступил в американскую армию. А если взять вообще все разработки, то только один робот (Spot) и только в 2019 г. Boston Dynamics робко начала продавать. О финансовом результате при таком раскладе, как говорится, либо хорошо, либо ничего, так что помолчим.
Зато теперь, благодаря этому вашему Дудю, мы знаем, каким образом и за чей счёт «идеальная общественная система» может позволить себе подобные вещи (см. здесь с 2:31:35 по 2:31:50). Вот не знали-не знали, а тут вдруг взяли и узнали.
Для сравнения, многие (если не большинство) учёные и инженеры в России в 1990-х гг., одновременно с научно-технической деятельностью, решали и несколько другие задачи, например: как прокормить семью на следующей неделе и куда для этого пойти подрабатывать — то ли грузчиком на стройку, то ли продавцом в ларёк? Только в 2010-х гг. Россия смогла хоть в какой-то степени вернуться к роботам (я имею в виду интерес на государственном уровне). Потому что в 2000-х гг. почти заново начинали работать многие промышленные предприятия (те, что дотянули), и их задачи в то время были связаны с первоочередными потребностями, обеспечивающими (не больше и не меньше) выживание страны. Несколько из таких направлений я перечислил выше, хотя их было гораздо больше. И это были не роботы.
Вот и посчитайте, сколько времени у России было полностью потеряно для робототехники. Примерно лет 20. Это было как раз то время, когда Boston Dynamics дорешала свои научно-технические вопросы с шагающими роботами и приступила к созданию своих всемирно известных теперь робошедевров; когда нынешние гиганты в промышленной робототехнике, такие как, например, Fanuc и KUKA, становились этими самыми гигантами; когда современная компонентная база (без которой роботы остались бы вон теми «табуретками на верёвочках») — в частности, электронная — за рубежом миниатюризировалась, совершенствовалась и выходила на уровень массового производства и массовой же доступности.
Не стоит удивляться, что, при более или менее сравнимых стартовых (в 1980-х гг.) позициях, в начале 2010-х мы видим на той стороне уже крупные транснациональные концерны со сложившейся кооперацией, с которыми практически невозможно конкурировать на, к тому же, уже поделённых мировых рынках робототехники, а у нас… отдельных энтузиастов и отсутствующую отечественную компонентную базу.
Это отвлечение — специально для любителей сравнивать робота Фёдора от НПО «Андроидная техника» с роботом Atlas. Конечно, нет железной уверенности, что, не держи нас семеро, мы бы всем показали робототехническую кузькину мать. Но и сравнивать пирожные с сапогами тоже некорректно.
К тому же, в профессиональной — научной и инженерной — среде принято с уважением относиться к коллегам. В конце концов, все работают на одном поле и все друг у друга чему-то учатся. И кто-то обязательно будет лучшим. Это вовсе не означает, что у остальных нет достижений. Они есть, и любое достижение достойно уважения. А категоричны в суждениях обычно дилетанты.
Но всё это уже другая тема. А мы вернёмся к нашей.
Так что же было дальше? А дальше всё более или менее всем известно. В 1992 г. Марк Рэйберт на основе своей группы из MIT Leg Lab основал Boston Dynamics, которая при финансовой поддержке ARPA / DARPA продолжила работу над своими роботами. В 2013 г. компания была куплена корпорацией Google. Однако уже к 2016 г. IT-гигант успел полностью разочароваться в своём «железячном» приобретении, и в 2017 г. компанию приобрела японская телекоммуникационная корпорация SoftBank.
Разработки компании также широко известны, ознакомиться с ними можно на её официальном сайте и на YouTube-канале Boston Dynamics. Наибольший фурор произвели BigDog (2004 г.), Atlas (2016 г.) и Spot (2016 г.).
Uptown Funk
Ловкость рук и никакого мошенства
Давайте постараемся хотя бы коротко разобраться, как же работает вся эта магия… или, вернее, могия.
Мы не будем описывать всех роботов Boston Dynamics. Их поверхностное описание и так можно найти везде, а для детального понадобится написать толстую книгу. Так что будет всё вперемешку. Ведь принципы построения конструкции, алгоритмы управления и навигации, интерфейс с человеком у них схожие. Развитие шло поступательно, технические решения заимствовались от предшественников, а дорабатывались отдельные подсистемы. Скажем, если у BigDog «конечности» приводились в движение гидроприводами, а гидронасос для них крутил двигатель внутреннего сгорания (ДВС), то в Spot для снижения шумности всё это заменено на электродвигатели. Atlas же по-прежнему использует гидравлический силовой агрегат, но тоже уже без ДВС. Это интересные, но детали, а мы окинем всё единым взглядом.
О законах динамики
В технической кибернетике (науке, изучающей управление техническими объектами) находят применение две группы методов управления. Первый подход основан на точном математическом описании процессов управления. В случае управления движением механизмов теоретическим базисом для него является ньютоновская (классическая) механика и классическая теория автоматического управления. Проблемой управления в данном подходе является определение законов управления, позволяющих достичь желаемого динамического отклика механизма, представляемого как цепь из твёрдых тел, связанных сочленениями (степенями свободы). С этой целью вначале решается обратная задача динамики, т.е. определяются силовые воздействия на звенья механизма, требуемые для обеспечения желаемого закона его движения.
Решение обратной задачи динамики для разомкнутой последовательной механической цепи, которую представляет собой манипулятор, находят обычно при помощи дифференциальных уравнений с использованием методов Лагранжа — Эйлера или Ньютона — Эйлера (хотя есть и другие) [1]. Для тех, кто хочет познакомиться с этими методами, так сказать, «пощупать их руками», могу посоветовать взять, для начала, первый из них, базирующийся на уравнениях Лагранжа второго рода. Пример решения обратной задачи динамики для несложной системы твёрдых тел с подробным понятным разбором я нашёл на сайте Института фундаментального инженерного образования ЮРГПУ (НПИ).
Кстати, тот же математический аппарат теоретической механики (раздел «динамика твёрдого тела»), только для случая прямой задачи динамики, используется, в том числе, в робототехнических симуляторах, которых сегодня существует большое множество. В частности, разработчики Boston Dynamics использовали симулятор Gazebo. Я же в своё время работал, возможно, с менее удобным для моделирования роботов, но более универсальным пакетом Adams от MSC Software.

Симуляция в Gazebo: Atlas подключает шланг к трубе
Второй подход к управлению не требует строгого математического вывода искомых законов управления объектами, а ориентирован на получение, по возможности, простых и интуитивно понятных зависимостей. Такие методы управления часто рождаются на основе наблюдений за живой природой и попыток (разной степени успешности) переложения её «изобретений» на технику. Это избавляет от необходимости теоретического обоснования полученного решения (включая, например, такие прелести, как доказательство устойчивости системы управления), однако может превратиться в бесконечную подгонку числовых параметров «по месту».
К данной категории можно отнести (из того, что вспоминается сходу), управление на основе нечёткой логики, искусственных нейронных сетей, обучения с подкреплением и пр. К упрощённым методам можно отнести и метод программирования роботов-манипуляторов обучением, когда манипулятор вручную проводят по траектории, которую он должен будет повторять.
Каждый подход обладает своими преимуществами и недостатками, но подробнее об этом в другой раз. Пока же отметим, что, например, системы управления промышленных манипуляторов, которые, работая на производстве, должны обеспечивать субмиллиметровые точности при позиционировании и движении по заданным траекториям, строят с применением, преимущественно, первого подхода. А вот для многошарнирных механизмов с десятками степеней свободы, гибкими (вследствие стремления к снижению массы) звеньями и сложным взаимовлиянием движений классические уравнения динамики становятся практически нерешаемыми. Зато от таких механизмов, как правило, и не требуют высокой точности. Всё это роднит их с живыми организмами, которые тоже не решают в уме дифференциальных уравнений, хотя, зачастую будучи ещё сложнее устроены, прекрасно справляются с управлением собственным телом. Специально для сложных устройств и придуман второй подход.
Робот для испытаний костюмов химзащиты: Petman, великий и ужасный — предшественник Atlas'а
Алгоритмы, разработанные в Leg Lab и перенесённые в Boston Dynamics, ожидаемо относятся ко второй группе методов. Шагающему роботу не очень важна точность движений, т.к. его задачи выглядят примерно так: «дойти из точки A в точку B, избегая падений». Как конкретно он это сделает, пользователя обычно не волнует.
В статьях сотрудников лаборатории описывается так называемое интуитивное управление. Движение роботов реализуется путём совмещения трёх интуитивно понятных относительно простых компонентов движения: поддержание заданной высоты «тела» за счёт вертикальных подскакиваний; управление наклоном «тела» за счёт моментов в шарнирах «таза» в фазах установки «ног» на поверхность; и поддержание равновесия за счёт установки «ног» в ключевые позиции исходя из принципа симметрии [2] [3]. Развивается идея виртуальных приводов, позволяющая управлять не по отдельности каждым реально существующим приводом (например, приводами «лодыжек», «колен», «таза»), а несуществующими, но интуитивно понятными приводами (например, движений «тела») [4]. Подобный подход реализуется для всех разработанных конструкций роботов, с учётом особенностей каждой конструкции.

Симуляция BigDog при отработке алгоритмов движения
Так что шагающие роботы Boston Dynamics не обеспечивают точности, достаточной, например, для сварки трубопроводов. Зато они успевают быстро решить, куда примерно поставить ногу, чтобы робот не упал на текущем шаге, и так для каждого шага.
Тема динамического управления роботами практически бесконечная. Свои алгоритмы и методики придумывает и перепридумывает чуть ли не каждый разработчик. Здесь мы только показали, с чего можно начать разматывать эту ниточку.
В завершение темы, отметим, что неправы те, кто считает видеоролики с роботом Atlas имитацией на том основании, что его ходьба и бег чересчур напоминают человеческие локомоторные движения. У роботов, мол, другие методы балансировки, и махи руками при ходьбе им не нужны [5]. Биологи молодцы, что рассказали нам про локомоторные движения. Будем знать. Я же как инженер добавлю к этому, что законы механики — они не разбирают, кто вы: робот, гепард или обезьяна. Они просто действуют, редиски, и ничего тут не поделаешь! Пошла ваша правая нога вперёд — возникла даламберова сила инерции, которая тем более значительна, чем большее ускорение вы придали ноге, а в результате равная ей по величине сила противодействия отталкивает ваше тело с правой стороны назад, стремясь развернуть его вокруг точки опоры — левой ноги. И вы хоть тресните, но либо компенсируйте её мышцами, либо выбрасывайте вперёд и что-нибудь слева (ну, например… руку? или, может быть, скажем… руку?) для балансировки. Да вы не верьте на слово, попробуйте сами побегать, прижав руки к бокам. Вам неудобно не размахивать руками не из-за рудиментарных цепей нейронов, издавна запрограммированных почему-то на именно такие локомоторные движения. Наоборот, именно такие локомоторные движения «зашиты» в нейроны потому, что так удобнее передвигаться.
А Atlas что, рыжий? Его тоже балансировать надо. И раз уж у него есть «руки», то почему не использовать их? Или кто-то хотел, чтобы робот выглядел, как человек, а бегал, как пингвин? Ну, кто хочет, может так и делать. Первые самые простые роботы именно такими и были. А «фишкой» Boston Dynamics является как раз «естественность» движений роботов. И даже если кого-то смущает, что для обучения робота использовались записи движений реального человека (я пока не нашёл сведений от разработчиков на этот счёт), то, вернувшись на несколько абзацев выше, мы увидим, что это обычный подход для робото- (и не только) техники. Уж такая она...
Ловкость ног. И рук. И никакого мошенства.
Кстати, Boston Dynamics вовсе и не скрывает [6], что, например, для съёмок приведённого выше короткого ролика потребовалось сделать более 20 подходов. Что они публикуют только самые лучшие получившиеся видеоролики, а не средние и не типичные. (Ну… Вообще-то, так делают все… Только тс-с-с! Чур, я этого не говорил!) И что их роботы не очень «интеллектуальны». Ребята, забудьте вы про этот «искусственный интеллект». Это совсем не то, что можно себе навоображать, да и слово «интеллект» затесалось, можно сказать, случайно: в английском варианте «artificial intelligence» слово «intelligence» не равнозначно слову «intellect».
Навигация и управление
Не скрывает компания и аспектов, касающихся управления роботами. На канале Адама Сэвиджа можно найти видео, где он разбирает, как управлять роботом Spot, одновременно освещая некоторые вопросы, связанные с его сенсорикой и системой навигации.

Адам Сэвидж: танец со Spot
Адам демонстрирует два способа управления: вручную с пульта (либо при помощи джойстиков, либо указанием каждой следующей целевой точки на экране, транслирующем видео с камер робота) или автономный. Для задания маршрута автономного перемещения используются метки, похожие на QR-коды (их видно также на ролике ниже), которые размещаются вдоль всего маршрута. После этого Spot необходимо вручную (с пульта) провести от метки к метке, при этом робот запоминает маршрут. Spot способен определять свою ориентацию относительно меток и удаление от них, т.к. их размеры и разметка ему известны. Во время движения робот строит 3-мерную модель окружающего пространства, обнаруживает препятствия и обходит их. Также он «видит» поверхности передвижения, распознаёт изменения высот на них и подстраивается, например, поднимаясь и спускаясь по ступенькам. А ещё он самостоятельно решает, какие «конечности» и как перемещать для выполнения задания, двигаться ему передом или задом наперёд и т.п.
Также на YouTube-канале Boston Dynamics имеется видео с наглядной демонстрацией принципов автономной навигации. На нём видно 3-мерную сцену, которую робот строит для обхода препятствий, а также навигационную карту, которую, видимо, он построил при предыдущих проходах.
Spot: автономная навигация
Рассмотрим принцип работы системы навигации роботов Boston Dynamics на примере робота BigDog [7] (как мы помним, у остальных роботов в общих чертах всё так же).
Система навигации основана на использовании комбинации стереозрения, данных LIDAR'а, блока инерциальных измерений (IMU, inertial measurement unit), GPS-приёмника и других датчиков (включая датчики сил), позволяющих оценить положение, ориентацию и параметры движения робота во внешнем окружении. Кстати, систему стереозрения для него создавала знаменитая Лаборатория реактивного движения, в которой в начале своей трудовой деятельности работал и Марк Рэйберт.
Облака точек, поступающие от LIDAR'а и стереокамер, сегментируются для построения связных объектов из разрозненных точек. Сегменты, соответствующие препятствиям, отделяются от сегментов поверхности передвижения, которых робот не должен «бояться». Причём такие препятствия как деревья и стены выявляются, преимущественно, LIDAR'ом, а булыжники и лежащие брёвна — стереозрением. Объекты, полученные после сегментации, запоминаются и продолжают отслеживаться с течением времени. Память робота некоторое время сохраняет и те объекты, которые он уже не может «видеть».
Для навигации используется общепринятый в робототехнике подход. Препятствия наносятся на карту стоимостей, cost map (имеются в виду, согласно математической терминологии, «стоимости» перемещения между точками маршрута), на основе которой и осуществляется планирование оптимального пути к конечной точке движения. Планировщик пути использует разновидность известного алгоритма поиска А*.
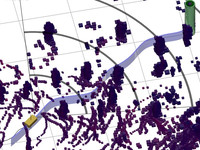
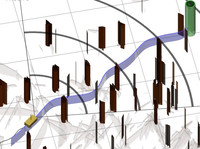
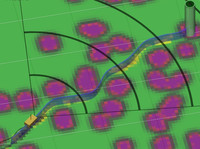
Процесс планирования пути проиллюстрирован ниже. На первой картинке синими точками показан массив «сырых» данных LIDAR'а за несколько секунд. На второй — соответствующие им объекты: деревья — коричневым, поверхность — бледным. На третьей картинке показан вид сверху на карту стоимостей: зелёная область — средняя стоимость, лиловый цвет — высокая стоимость, жёлтая область (по которой проведена голубая лента построенного пути к цели) — низкая стоимость.
Планировщик пути примерно раз в секунду генерирует новый путь, стараясь при этом следовать плану, который был выработан на предыдущих шагах (но не гарантируя этого). Алгоритм удержания пути направляет робот с целью следования по самому «свежему» пути, одновременно сглаживая траекторию, если робот в данный момент на нём не находится.
Можно обсуждать ещё много интересных технических деталей, касающихся особенностей реализации алгоритмов автономной навигации роботов Boston Dynamics, однако это выходит за рамки данного материала. Часть информации можно найти опубликованной, например, в материалах конференций. Какая-то часть, видимо, разработчиками не разглашается. Но можно уверенно сказать, что все роботы Boston Dynamics используют приблизительно схожие алгоритмы. Например, на роликах с роботом Atlas видно всё те же метки, помечающие маршрут его движения и объекты, с которыми он работает. А на публичных демонстрациях Atlas'а присутствует человек-оператор, вручную управляющий роботом с пульта.
От себя добавлю, что компания использует и ещё один способ управления роботами, кроме двух перечисленных выше, а именно, жёсткое программирование их движений. Выполнение движений в цикле по записанной фиксированной программе — это, конечно, не полноценное управление роботом, но именно это периодически и «взрывает сеть» самыми «вирусными» роликами от Boston Dynamics.
Взлёты и падения
Чем мне нравятся ребята из Boston Dynamics, так это своим юмором. Они не особо скрывают, в том числе, и падений и неудач своих роботов, а скорее всего, и сами веселятся над неудавшимися дублями на съёмках (хотя можно позавидовать их покер-фейсам в роликах во время «издевательств» над роботами). Когда в кювет съезжает и переворачивается колёсный робот, это не вызывает особого интереса. А если заваливается и без того забавный механический гуманоид, нелепо размахивая тем, что у него вместо рук и ног, то все зрители гомерически ржут. Ну, и правда, разве это не смешно?
Как по мне, так эти падения только подтверждают то, что всё по-честному, без имитаций, «и никакого мошенства»! Обычная инженерная магия. Временами корявенькая, но… «у всех свои недостатки».
Восстание роботов
Недавно смешные ребята из студии Corridor решили поддержать традицию шуток про роботов Boston Dynamics, выпустив пару остроумных и красивых видео на тему (вот это и это). Надо сказать, что они попали в точку, эксплуатируя сразу две распространённых реакции на демо-ролики компании (особенно на тот, где роботу хоккейной клюшкой мешают выполнять его работу, а потом ещё и роняют, толкая трубой): сочувствие «страданиям» робота и страх перед возможной местью роботов за прошлые издевательства.
Правда, часть не слишком внимательных зрителей (особенно, не англоязычных) приписали авторство роликов самой Boston Dynamics, восхитившись или испугавшись (в зависимости от собственных ожиданий) прогресса робототехники. Несмотря на надпись «Bosstown Dynamics», на видео-постскриптумы в самих роликах и на то, что вслед за первым роликом студия выпустила и подробное видеоразъяснение о том, как они «подделали» робота (позже оно появилось здесь в русской озвучке). Впрочем, это не так важно. Думаю, если поставить Boston Dynamics задачу снять подобный ролик, они бы плюс-минус похоже справились и со своими роботами, почти без компьютерной графики, склеив тысячу отдельных фрагментов запрограммированных движений. С компьютерной графикой это просто дешевле.
Кажется, ознакомившись хотя бы с настоящим нашим материалом, можно однозначно понять, что уровень современной передовой робототехники совершенно не тот, каким он предстаёт в фантазиях ребят из Corridor (даже если бы их ролики не были очевидным розыгрышем). Но и это тоже не главное.
Главная ошибка в массовом восприятии роботов заключается в том, что люди интуитивно наделяют их тем, чего у них нет и быть не может: душа (а следовательно, чувствами и интеллектом). Вот так вот. Стараясь следовать научному подходу, я не люблю в вопросах науки и техники категоричных оценочных суждений. Но это именно тот, особый случай, когда полезнее сказать прямо, чем оперировать корректными, но замысловатыми научными абстракциями. Ещё раз: у роботов нет, не может быть и никогда не будет чувств и интеллекта.
Когда вы знаете до винтика конструкцию спроектированного вами механизма и до каждого полевого транзистора — устройство расположенных в нём разработанных вами плат; когда вы собственными руками устанавливали электродвигатели и подшипники в шарниры и вытирали гидравлическое масло с протёкшего шланга; когда это вами написанная программа обрабатывала массивы чисел, соответствующих отражениям вращающегося лазерного луча LIDAR'а, установленного ещё на лабораторном столе, а не на роботе; когда вы сами методом триангуляции вычисляли расстояния до объектов пространства по изображениям, полученным со стереопары; когда вам приходится ещё и чинить сломавшихся роботов чуть ли не после каждой демонстрации… то у вас не возникает вопросов, откуда робот берёт информацию об окружающем мире и каким образом он шевелит конечностями.
Куски BigDog. Это они будут подчинять себе человечество?
Если это ваши пальцы печатали буковки программного кода, отвечающего за принятие решения о точке (ближе-дальше, левее-правее) установки «ног» робота на поверхность для поддержания равновесия; если именно вы выбирали используемые роботом алгоритмы навигации для движения на пересечённой местности; если вы собственноручно подбирали, например, числовые параметры, определяющие «жадность» ε-жадного (ε-greedy) алгоритма машинного обучения, выполняющего поиск оптимальной стратегии удержания заданной траектории; да потом ещё и многократно отлаживались, отслеживая значения всех переменных программы… то вы не питаете иллюзий о степени «интеллектуальности» вашего робота. Просто это вы сами весь его «искусственный интеллект» и запрограммировали.
Простыми словами, этот, так сказать, «искусственный интеллект» — всего-навсего звучное название для алгоритмов программной самонастройки параметров, заданных человеком, по критериям, заданным человеком, в пределах, заданных человеком. Какое уж тут восстание!
Роботы ничего не чувствуют. Не более, чем дверной косяк, который иногда для плачущего ребёнка показательно шлёпают, чтобы «наказать» за набитую шишку (хотя я никогда не слышал о борцах за права дверных косяков). Роботы ничего не думают. Не более, чем игрушки-трансформеры, для которых детишки во время игры в битву роботов придумывают поведение и диалоги.
Так что теоретики восстания роботов могут расслабиться. Чтобы роботы захватили мир, практикам-инженерам придётся запрограммировать каждый шаг, шажок и подшагивание на пути к захвату мира. С учётом всех вариантов и подвариантов, когда неизбежно что-то пойдёт не так. А после завершения стадии программирования — ещё и многократно отладить программу захвата мира роботами на реальном объекте. Интересно было бы посмотреть на процесс!
Робот — это такой же механизм, как автомобиль, цеппелин или требушет. «Восстание требушетов» — по моему, звучит! Уж и тех требушетов больше нет, но пока они были, они ведь так и не захватили мир? Потому что ни требушеты, ни роботы миры не захватывают. Следите лучше за теми, кто ими управляет.
А всё дело в том, что человек неплохо научился обманывать свой собственный мозг. Конечно, мы видели и такие фантазии, в которых обретают своё враждебное человеку сознание всякие грузовики, газонокосилки и автоматы с газировкой (см., например, фильм «Максимальное ускорение»). Но это выглядит не страшно, а, скорее, смешно. Никто не верит. Зато в добрую или злую волю подобных себе существ человек верит легко (даже в упомянутом фильме в итоге пришлось коряво приплетать зловредный инопланетный разум — без него бы, наверное, совсем «не зашло»). Вот эту человеческую фобию и нащупали производители волнующих историй про восстание роботов, и продолжают радостно её поддавливать, стараясь максимально правдоподобно обмануть органы чувств человека, чтобы машины казались ему похожими на него самого.

Топливозаправочная колонка-убийца — кадр из фильма «Максимальное ускорение»
Просто надо понимать, что казаться чем-то не значит этим быть.
Иное дело, когда машина, неотличимая от человека, действительно непосредственно управляется кем-то, как в фильме «Суррогаты». Но это уже совсем другая история, не имеющая отношения к восстанию машин.
Заключение
Мы начинали с того, что будем поменьше отвлекаться на стереотипы о Boston Dynamics, а в результате весь рассказ вокруг стереотипов и крутился. Вот она, цена славы! И всё же, подведём итоги.
Роботы от Boston Dynamics — это не прорыв. Это шедевр.
Шедевр —… непревзойденное творение, высшее достижение… мастерства. [8]
Все прорывы были сделаны раньше. Связаны они были с успехами в разработке алгоритмов шагания и поддержания равновесия, причём не только командой Leg Lab, а совместными усилиями учёных и инженеров всего мира. Ещё были научно-технические прорывы и достижения в разработке другими производителями компонентов, позволивших сделать роботы действительно мобильными: компактная микроэлектроника, энергоёмкие аккумуляторы, эффективные гидравлические и электромеханические агрегаты, техническое зрение (программные алгоритмы и аппаратура: стереокамеры, LIDAR'ы).
Тогда-то и настало время для шедевров робототехники. Есть много коллективов, создававших шагающих, бегающих и прыгающих роботов. Просто на сегодняшний день Boston Dynamics в этом, кажется, лучшие.
В чём же конкретно они лучшие? Так сказать, в чём история успеха? В первую очередь, конечно, в настойчивости. 40 лет непрерывно работать в одном направлении — это заслуживает уважения! С инженерной же точки зрения, вот сильные стороны роботов Boston Dynamics:
- те самые алгоритмы поддержания равновесия и передвижения шаганием и прыжками,
- отточенная, вылизанная за много итераций и оптимизированная по весу конструктивная компоновка,
- отличная динамика приводов,
- современная сенсорика, обеспечивающая все доступные на сегодня возможности для управления,
- в последнее время — приятный внешний вид, красивые закруглённые формы; видна работа профессиональных дизайнеров.
А вот если мы посмотрим с точки зрения конечного пользователя или с коммерческой, то энтузиазма у нас поубавится. Инженерам-то, конечно, интересно решать сложные технические задачи, но для пользователей это всего лишь очередная игрушка. На несколько минут (или часов). Которая быстро надоест. Но очень дорогая игрушка, по стоимости сравнимая с автомобилем. Сложная игрушка, которую надо будет ещё и обслуживать, как тот же автомобиль. И которую поэтому пока не очень понятно, кто будет покупать. И ещё менее понятно, когда она окупит вложения.
Почему игрушка? Да потому, что реального полезного применения этим роботам немного. И кардинальных преимуществ по техническим характеристикам, в сравнении с другими, более доступными устройствами, у них, увы, нет.
Наконец, развеем мифы. Роботы Boston Dynamics (как и все другие) не могут и никогда не смогут делать всё, как человек. Похоже выглядеть — да. Решать типовые задачи, на которые уже сегодня можно натренировать и какой-нибудь другой автомат (банкомат, видеосистему для распознавания лиц) — да. Имитировать эмоции — да.
А переживать эмоции: радость, грусть, удовлетворение, сострадание, злость; чувствовать чувства; думать мысли — нет. Самостоятельно развиваться — нет. Захватывать мир — нет.
И ещё, если смотреть по состоянию на сегодняшний день, роботы Boston Dynamics, по современным меркам, не очень… «интеллектуальны», и производитель этого не скрывает. В них сделан упор на стабильность работы. А, скажем, современные беспилотные автомобили в части навигации могут решать задачи и посложнее. См., например, беспилотники от Яндекс [9].
Ну, а попутно разрушаем ложные ожидания от так называемого «искусственного интеллекта». «Искусственный интеллект» — это всего лишь звучное название для скучных алгоритмов, даже если кто-то ожидал чудес.
Чудес не будет. У инженеров — всего лишь магия, как и написано в эпиграфе.
http://www.robotexnik.info/publ/robotics/boston-dynamics/1-1-0-10
- ↑См., например: Шахинпур, М. Курс робототехники. Пер. с англ. — М.: Мир, 1990. — 526 с.: ил. ISBN 5-03-001375-X (глава 5)
- ↑Jerry Pratt, Gill Pratt. Intuitive Control of a Planar Bipedal Walking Robot
- ↑Marc Raibert, Kevin Blankespoor, Gabriel Nelson, Rob Playter. BigDog, the Rough-Terrain Quadruped Robot
Приблизительный частичный перевод можно найти здесь - ↑Jerry Pratt, Ann Torres, Peter Dilworth, Gill Pratt. Virtual Actuator Control
- ↑Американский робот Atlas: Так ли он крут?
- ↑You’re Expecting Too Much Out of Boston Dynamics’ Robots
- ↑David Wooden, Matthew Malchano, Kevin Blankespoor, Andrew Howard, Alfred A. Rizzi, and Marc Raibert. Autonomous Navigation for BigDog
Приблизительный частичный перевод можно найти здесь - ↑Шедевр — Википедия
- ↑Беспилотный автомобиль Яндекс
- Boston Dynamics — сайт компании
- YouTube-канал Boston Dynamics
- BigDog Beta (early Big Dog quadruped robot testing) — Youtube-канал Seedwell
- MIT Leg Laboratory
- Robots from MIT's Leg Lab
- Atlas (robot) — Wikipedia
- How Boston Dynamics' Spot Robot Works!
- Как Boston Dynamics создала самых знаменитых роботов в мире и когда они начнут помогать людям
- Искусственный интеллект — Терминология
- Hapless Boston Dynamics robot in shelf-stacking fail
- Boston Dynamics' Atlas Falls Over After Demo at the Congress of Future Scientists and Technologists
- ROBOT FAIL!!! Boston Dynamics
- SpotMini robot failed on stage Amazon Re: MARS 2019
- YouTube-канал Corridor
Комментариев нет:
Отправить комментарий