
Всем привет.
Решили заняться с другом созданием мощного заднеприводного багги для езды по грунтовой дороге. Для себя определили, что разгон должен быть около 5 секунд до 100 км в час. В идеале выйти из 5 секунд. Строить по классической схеме, где сердце багги - это двигатель от ВАЗ нам показалось неинтересным. Долго думали, чтобы такое придумать и идея пришла сама собой. В свое время мы ездили с ним в Японию и уже там на выставках познакомились с входящими тогда в популярность электромобилями.

За основу Багги мы взяли электрический бесколлекторный мотор от Nissan. Его изюминкой является большой крутящий момент порядка 280нМ с самого начала оборота. Так как багги электрический, а нынче тренд ко всему электрическому добавлять "e", то и наш проект мы назвали еБагги.
В японском электрокаре установлен синхронный трехфазный электромотор мощностью 80 киловатт (109 л.с.) при 2730-9800 оборотов в минуту. Двигатель Nissan Leaf дает крутящий момент 280 Н·м. Паспортный разгон до 100 км/ч составляет 11,9 с. , а максимальная скорость авто равна 145 км/ч. При весе автомобиля значительно превышающим вес нашего багги. График

По графику сразу видно, что диапазон работы оборотов двигателя гораздо выше, чем у 1.6 литрового атмосферного собрата. В электромоторе от 0-10500 оборотов. У атмосферника 900-6500. Во вторых полка момента в 280 Нм доступна сразу с 0 оборотов и вплоть до 2700 оборотов и далее идет плавное уменьшение крутящего момента. Связано это с тем, что с ростом оборотов магнитное поле не успевает за скоростью мотора и его влияние на отталкивание ослабевает. Именно поэтому в любом электромобиле типо Теслы, Лифа, да и просто троллейбуса/трамвая Вы чувствуете с самого старта пинок а потом плавное ускорение. А вот пик лошадиных сил доступен не сразу, но зато с 2700 и вплоть до 10 тысяч оборотов. Если посчитать площади крутящего момента и мощности, то они будут не менее в чем в 2 раза превышать площади атмосферного двигателя.

Один из самых дорогих элементов самодельной электробагги это высоковольтная батарея. Мы брали на разборке одну из самых недорогих. Основная задача это покатушки на даче и в деревне, никаких важных поездок по городу или межгороду не предвиделось. Цена батарейки с 6 делениями остатка емкости порядка 100 тысяч рублей. В нашей батареи остаток чуть более 60%, что с весом багги порядка 850 килограмм позволит кататься в районе 80 км по пересеченной местности. Мы хотели оставить именно родной корпус батареи от Ниссан Лиф. Почему? Во первых он герметичен, что позволит испытывать нашу багги и в водных условиях. Во вторых качество исполнения электроники самой батареи и ее защиты на самом высочайшем уровне. В дальнейшем мы можем экспериментировать, меняя ячейки батареи на более современные. Что позволит или значительно уменьшить массу при той же емкости батареи или увеличить емкость при примерно той же массе.
Параметры бaтapeи 24 kВтч; Tип Li-on; Koличecтвo ячeek 192 шт.; Cрок cлyжбы 5 лeт; Macca 270 kг Пoтpeблeниe элeктpoэнepгии нa 100 km 21 kВтч; Вpemя зapядkи (220 Вoльт) 9 чacoв; Нomинaльнoe нaпpяжeниe 360 V.

Каркас делался из металлических труб, которые далее покрывались эпоксидным грунтом и специальной стойкой краской.

Основные компоненты подвески было принято решение ставить от Нивы, так как это крайне доступно по наличию и проверено десятилетиями. Исключениями явились кардриджи стоек и задние пружины. Они от VW и Mercedes.

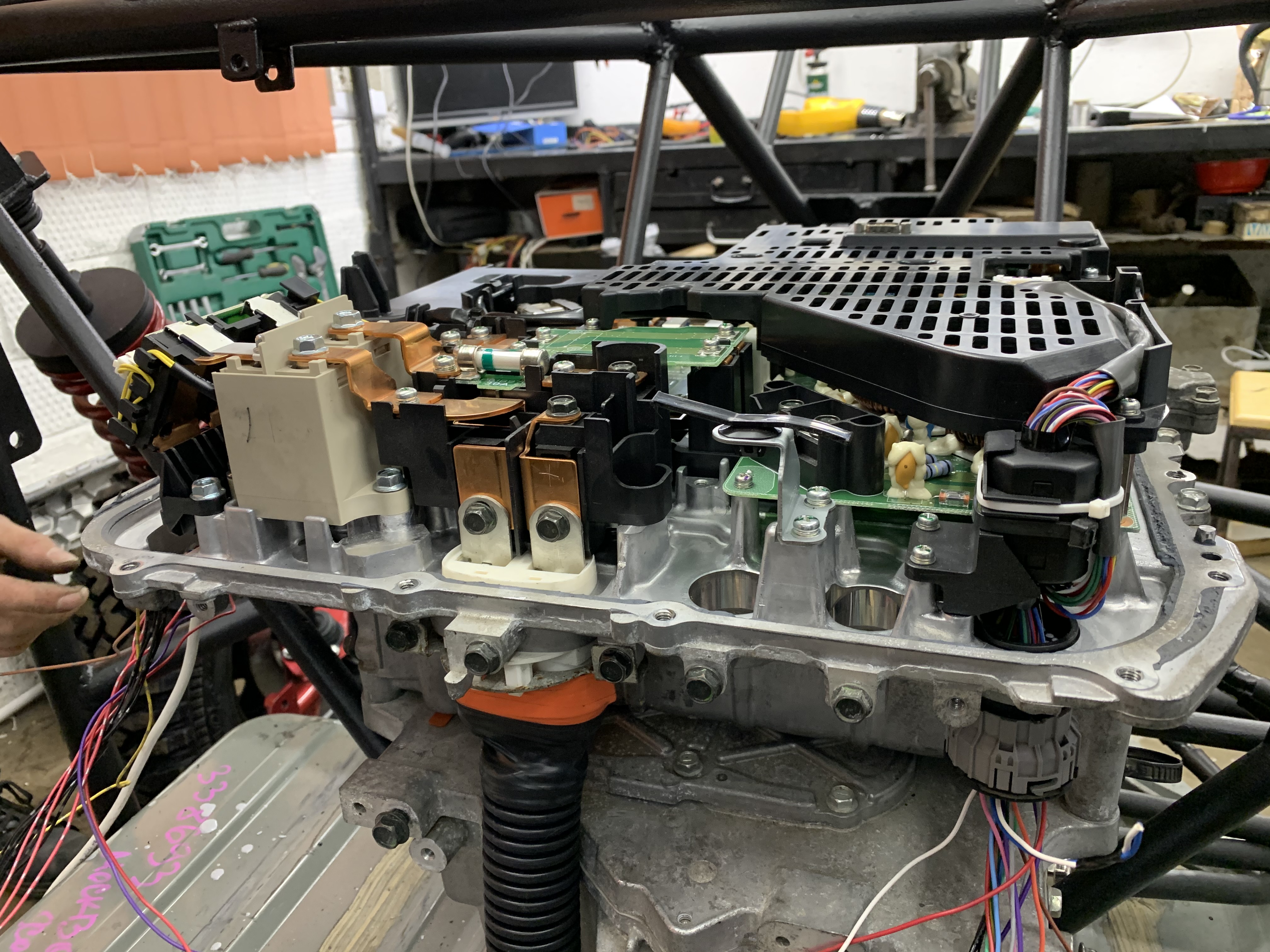
Но недостаточно, чтобы багги заработал, просто взять соединить батарею мотор и педаль воедино. Нужен мозг, который будет этим всем делать управлять. Многие оставляют штатный ниссан, вырезая блок за блоком и часто получая ошибки на самых разных уровнях. Мы пошли дальше, вооружившись устройством для считывания команд CAN шины мы разобрались со всеми блоками, которые нам необходимы. Далее центральный контроллер мы сделали свой. На этапе отладки на ардуино. Далее перейдем на более правильные промышленные решения.
Собрав рулевое управление, нам стало интересно сделать не просто багги, а радиоуправляемую и в дальнейшем автономную машину. Начали копать в сторону работы электромотора усилителя руля. Выяснили, что его принцип рассчитан на работу тензодатчика. Тензометрический датчик (тензодатчик; от лат. tensus — напряжённый) — датчик, преобразующий величину деформации в удобный для измерения сигнал (обычно электрический), основной компонент тензометра (прибора для измерения деформаций). Далее разобрались с командами, которые необходимо присылать на ЭУР в зависимости от скорости движения. Тем самым научились менять усилия ЭУР как нам надо. Изучив тензодатчик поняли его непростое управление и сэмитировали сигналы на ардуино, подключив библиотеки от пульта PS4 PRO.
Кому интересно, проходите по ссылке на этой картинке - она ведет на видео, где подробно рассказываем все этапы. Через неделю расскажем как поставили на колеса и про первые испытания.
Комментариев нет:
Отправить комментарий