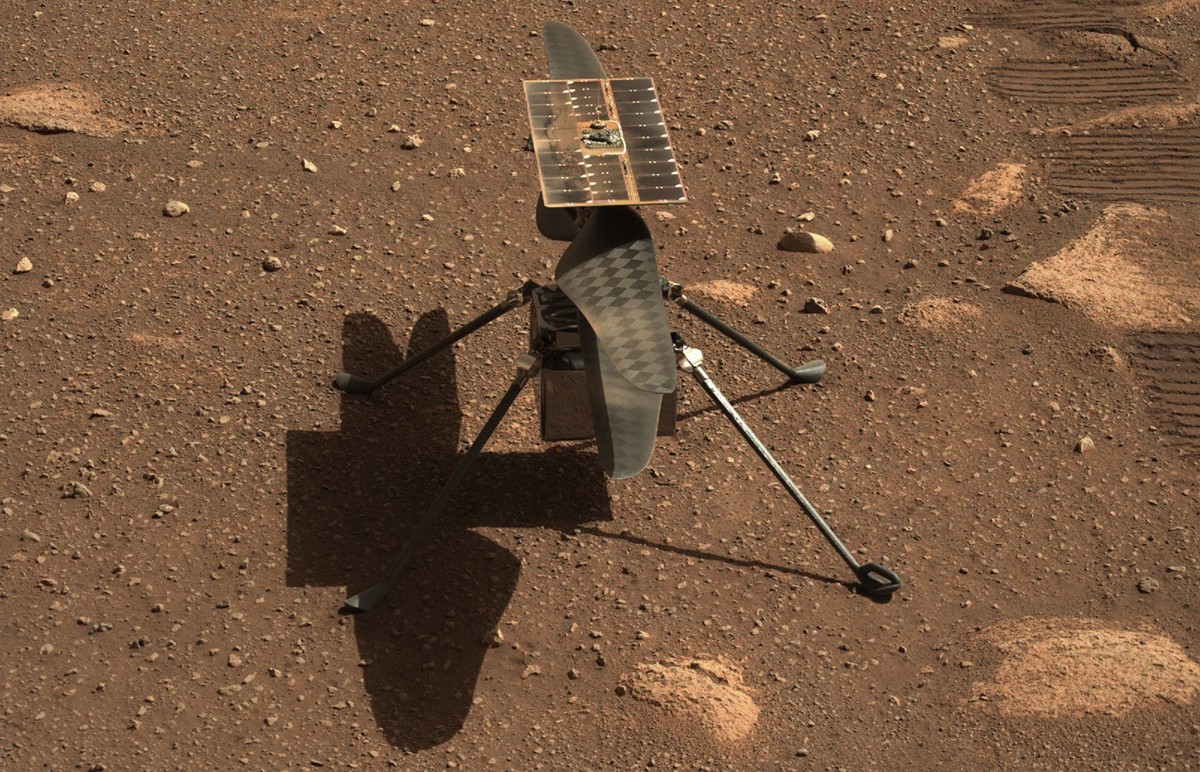
Вертолет «Индженьюити» на поверхности Марса. Источник фото: бортовая камера на марсоходе «Персеверанс».
10 апреля 2021 года специалисты лаборатории реактивного движения NASA (Jet Propulsion Laboratory, JPL) сообщили, что во время теста лопастей марсианского вертолета «Индженьюити» на высоких оборотах произошла нештатная ситуация. Аппарат не пострадал, вероятно возникли неполадки в аппаратном и программном обеспечении. НАСА обрабатывает полученные данные телеметрии и уже перенесло дату первого полета вертолета на 14 апреля или позже, в зависимости от решения текущей проблемы и дополнительных тестов.
НАСА уточнило, что во время последнего теста последовательность команд, управляющая элементами теста, завершилась досрочно из-за истечения сторожевого таймера (“watchdog” timer expiration). Это произошло, когда вертолет самостоятельно пытался перевести режим работы бортового компьютера из «Предполетного» в «Полетный». Специалисты JPL проверили и подтвердили, что сейчас вертолет прекратил процесс тестирования, находится в безопасном состоянии и внешне не пострадал. Он передал в ЦУП на Землю все необходимые телеметрические данные.
Аппаратный сторожевой таймер контролирует последовательность выполнения команд и предупреждает систему о любых потенциальных проблемах. В данном случае он помог системе вертолета оставаться в безопасности, не дал продолжить работать в нештатном режиме и предотвратил поломку устройства.
Специалисты JPL сейчас проверяют телеметрию, чтобы диагностировать и понять проблему. После этого они проведут еще один тест работы лопастей на высоких оборотах (~2400 об/мин).
Ранее НАСА планировало, что первый автономный полет марсианского вертолета на три метра вверх с зависанием должен был состояться вечером 11 апреля. Теперь он перенесен на еще минимум на три дня — до 14 апреля или позже.

Марсоход «Персеверанс» находится на удалении 65 метров, его бортовые камеры внимательно следят за вертолетом «Индженьюити».
«Марс труден не только тогда, когда вы приземляетесь, но и когда вы пытаетесь оторваться от него и летать вокруг над планетой», — пояснила руководитель проекта «Индженьюити» МиМи Аунг (MiMi Aung). О том, какие трудности возникли при реализации этого проекта, можно почитать в этой публикации на Хабре.
Вертолет «Индженьюити» имеет массу 1,8 кг, четыре опоры с посадочными чашками, на его борту установлены две цветные камеры (0,5 МП для ориентации и 13 МП для аэрофотосъемки в 4K), система навигации, включая лазерный высотомер от SparkFun Electronics и гиростабилизатор (IMU), система передачи данных (канал связи до 250 Кбит/с на расстоянии до 800 метров от марсохода), а также аккумуляторные батареи и солнечная панель. На дроне установлены два соосных несущих контрвращающихся карбоновых винта диаметром 1,2 метра каждый, их обороты будут достигать 2 537 в минуту. Заряда батарей должно хватать на один полутораминутный полет, на который в среднем затратится 350 Вт мощности.
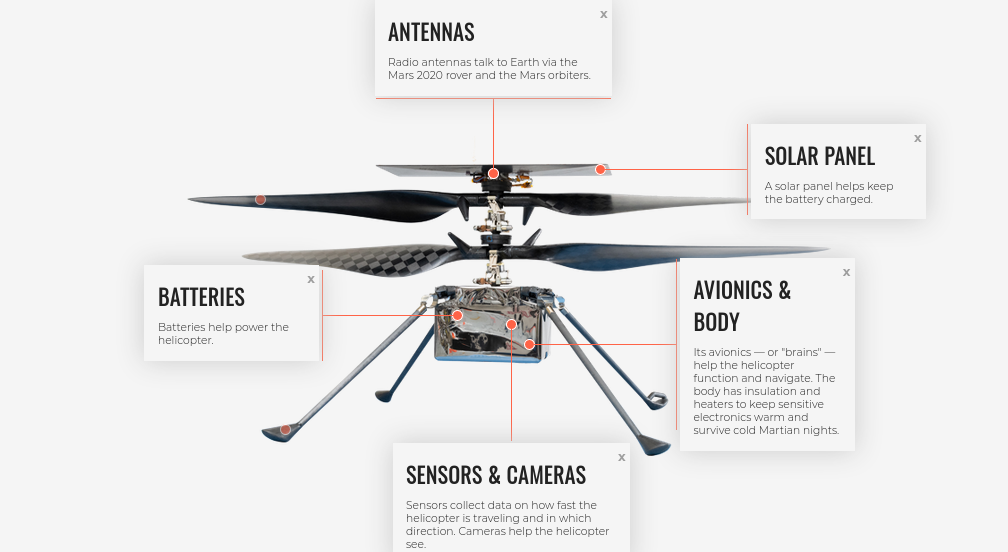
Элементы марсианского вертолета.
Аппаратные системы «Индженьюити» основаны на плате SoC Snapdragon 801. В нем установлен Linux и открытое ПО. Вертолет будет летать самостоятельно, без участия оператора. Он должен взлетать, делать несколько маневров и приземляться, ориентируясь на местности автономно, задействуя лишь минимум команд с Земли, отправленных заранее.
Заявленное НАСА время автономной работы дрона на поверхности Марса — 30 солов (31 земные сутки). За это время он должен подготовить свои бортовые системы, совершить первый тестовый полет, состоящий из тридцатисекундного подъема на три метра, а также четыре-пять запланированных полетов на дальние расстояния, в которых он будет подниматься на высоту до 5 метров и отлетать от марсохода на расстояние до 100 метров. Фактически пятая часть этого времени уже прошла, а вертолет еще не взлетел даже один раз. Вероятно, что количество его полетов НАСА сократит из-за деградации батарей и проблем с незащищенной аппаратной частью, которая не сможет работать дольше расчетного срока.
Цель использования первого БПЛА на Марсе — разведка, исследование труднодоступных мест и сбор данных для создания более совершенных дронов, способных работать в разреженной атмосфере планеты в будущем.
4 апреля вертолет «Индженьюити» в штатном режиме отделился от марсохода и десантировался с высоты 10 см от его брюха на поверхность планеты.
5 апреля НАСА сообщило, что вертолет успешно пережил первую марсианскую ночь в автономном режиме. Его бортовые системы выдержали внешнюю температуру около -90°C. Сейчас вертолет самостоятельно заряжает свои батареи и готовится к первому полету.
7 апреля 2021 года НАСА опубликовало селфи марсохода «Персеверанс» вертолетом «Индженьюити». Тогда же стало известно, что вертолет впервые в тестовом режиме совершил вращение лопастями на Марсе.
9 апреля 2021 года «Индженьюити» успешно разблокировал роторы двигателей и протестировал запуск лопастей на низких оборотах.
Вертолет «Индженьюити» проверил работу лопастей на скорости 50 оборотов в минуту.
Комментариев нет:
Отправить комментарий