Подсказка: сделать все маленьким.
Вступление
Всем привет. Я по образованию я инженер по эксплуатации летательных аппаратов и авиационных двигателей. В данной статье я опишу как сделал небольшой электродвигатель на сверх проводниках и поэтому мое вступление прошу принять как оправдание тому, что в разработке и изготовлении электродвигателей я не обладаю достаточной компетенцией и опытом, но все-же я его сделал. А посему уважаемые эксперты, специалисты, профессионалы и аналитики прошу сделайте поблажки для дилетанта, а всю критику и доказательства вашей правоты прошу предоставить в виде решений, изготовленных собственными руками.
Начало
Так получилось что весной 2019 я начал работать инженером в компании СуперОкс. Я принимал участие в разработке двигателя на сверхпроводниках (Фото). Работа по началу была интересная и иногда пыльная в перемешку со стружкой из различных материалов. Столько проблем удалось решить :). Спустя пол года я понял что путь до полноценного самолета с двигателем на сверхпроводниках будет долгим и сложным. Тогда родилась идея сделать свой двигатель, поставить его на маленький беспилотник или радиоуправляемый самолет и совершить хотя бы один полет.
{kind=link}
Для справки. Когда я только узнал об этой компании, то я знал что такое сверхпроводник, но не предполагал что производство такого продукта существует в РФ. Реально было приятно, что такие производства существуют и развиваются.
В процессе работы и общения с коллегами узнавал всякие тонкости и особенности применения сверхпроводников. По мере приобретения знаний менялась и адаптировалась конструкция двигателя.
Где-то в январе 2021 года появилось чувство, что если ничего не начать делать, то момент может быть упущен навсегда (пока семь раз отмеришь, другие уже давно отрежут). На этот момент я считал что накопил достаточное количество знаний для реализации всего проекта и начал параллельно с основной работой занимать своим двигателем.
Изначально идея была разработать двигатель на базе какого-либо доступного коллекторного электродвигателя для радиомоделей с внешним ротором на постоянных магнитах (аутранер).

Но на этом пути были такие явные сложности:
-
трудоемкость намотки обмоток на статор. (Дело в том что сверхпроводник представляет собой металлическую ленту с несколькими слоями напыления. Сам по себе сверхпроводник это тонкий слой керамики. Если ленту сильно гнуть, то можно повредить слой сверхпроводника (https://kokos-asi-production-hot.hb.bizmrg.com/blockeditor/cfd/cfd21b82899873e22f77f08b0916d74b/5_2_1x.jpg );
-
статорное железо (магнитопровод) будет в жидком азоте. На его охлаждение требуется потратить дополнительный объем азота. Также статорное железо при работе электродвигателя будет греться и поэтому азот будет испаряться интенсивнее;
-
сложность вывода вала воздушного винта. Нужно обеспечить теплоизоляцию между ротором и криостатором. Так-же необходимо защитить ротор от намерзания льда и конденсации кислорода на поверхности ротора;
-
сложность при коммутации обмоток. Лента проводника тонкая и гнется с некоторыми ограничениями, паять 24 контакта пытаясь уложить в малый объем должно быть довольно сложно.
{kind=link}

Дальнейшие размышления были о возможности перейти к бесщеточным электродвигателям с внутренним ротором на постоянных магнитах (инранер). Эта идея выглядела более привлекательнее. Важное изменение это решение продувать испаряющимся азотом полость ротора. Благодаря этому при постоянном потоке испаряющегося азота внутрь недолжен проникать воздух вместе с влагой и кислородом. и поэтому недолжны замерзать подшипники. Если бы внутрь начал проникать воздух, то влага из него стала конденсировать на поверхности внутренней части корпуса ротора. Образовавшийся лёд мог легко прихватить как подшипники, так и сам ротор к внутренней стенке. Но не меньшую опасность мог представлять кислород. Дело в том, что он конденсируется при температуре порядка -167 градусов Цельсия (для сравнения азот кипит при -196,5 градусах Цельсия). Это приводит к более интенсивному испарению азота при поглощении энергии конденсации кислорода и его охлаждении, через тонкую стенку. И сам факт наличия жидкости, в полости где должен вращаться ротор, отрицательно влияет на работоспособность двигателя.

У этой конструкции плюсов было больше чем у предыдущего решения. Однако наличие магнитопровода статора также грозило существенным увеличением трудоемкости. Самый простой выход из этой ситуации это избавиться от магнитопровода. Так пришла идея сделать двигатель без магнитопровода (статорного железа).
Но ещё оставался вопрос как увеличить взаимодействие магнитного потока между катушками статора и постоянными магнитами ротора. Магнитопровод нужен для того что-бы передавать магнитный поток, но если катушку поднести максимально близко к магниту (ещё лучше что-бы магнит находился внутри катушки), то возможно это позволит компенсировать отсутствие магнитопровода.
И тогда постепенно выкристализовалась идея конструкции с шестью распределенными катушками через один полюс и ротором с двумя полюсами.
План "А"
На виде с верху это выглядело так:

Далее я начал прорисовку идеи в 3d-cad T-Flex. К этому времени удалось раздобыть несколько постоянных магнитов, геометрия которых определила габариты ротора и как следствие габариты всего двигателя в последующем.
Так появилась примерно такая конструкция:

Пришлось потратить кучу времени на разработку рамки для катушки. Основная проблема заключалась в том, лента ВТСП фактически гнется только в одной плоскости, но допускает некоторое кручение. Сочетание этих двух факторов ограничивают траекторию по которой эта лента может быть уложена. Но в конце концов удалось начертить и напечатать на 3д принтере первый прототип рамки, на который удалось успешно закрепить ленту сверхпроводника.

Помимо рамки также был напечатан корпус ротора для размещения магнитов, опоры и цилиндр внутренней трубы. Добыты подшипники и ось ротора.
Для отладки двигателя, на рамки вместо ленты ВТСП, была намотана обмоточная медная проволока. На каждую рамку уместилось 4 витка (по рекомендации человека который занимался расчетами двигателя необходимо было 5 витков).

Все было собрано, спаяно и подключено к регулятору скорости ESC Castle Talon 90.
Первая попытка запуска медного аналога показала очевидное - низкий крутящий момент. В первоначальный момент контроллер начинает принудительно вращать ротор без обратной связи. После того как начинает работать обратная связь контроллер может нормально управлять двигателем. Но из-за отсутствия магнитопровода обратная связь по обратной ЭДС была затруднена, а низкий крутящий момент и момент инерции ротора приводили к тому, что ротор не успевал раскручиваться и совершал колебательные повороты около некоторого равновесного положения.
Но после принудительной раскрутки ротора двигатель запустился. И начал вращаться так лихо, что у меня возникло опасение, что напечатанный ротор разлетится на сегменты и магниты как шрапнель полетят в стороны. Тогда удалось намерять 14 тыс.об./мин и замечена ещё одна особенность: на больших оборотах момент был больше чем на малых. В следующем эксперименте я поднял входное напряжение до с 12 В до 24 В и тогда двигатель начал самостоятельно запускаться.
Этот предварительный успех можно сказать окрылил меня. Полагая что при больших токах и оборотах порядка 10 тыс. об/мин будет достаточно для вращения воздушного винта небольшого диаметра и малого шага, я решил сделать двигатель горизонтальной компоновки, с прямым приводом на воздушный винт.
Но предстоял ещё один неприятный момент. Дело в том в вертикальной компоновке катушки должны были быть в термозащитном контейнере (термокружка из икеи? :)), а в центре находится тонкостенный цилиндр из пластика. Сверху должна быть крышка которая направляет испаряющийся азот в цилиндрическую полость ротора откуда выбрасывается в атмосферу. Этот газообразный азот при своем истечении не дает проникать в полость ротора атмосферному воздуху. Решение этой проблемы нашлось довольно изящное на мой взгляд. В верхней части сосуда где размещается азот была спроектирована трубка с отверстиями. Эта трубка отводила испарения азота вниз вдоль передней стенки двигателя (двигатель с толкающим винтом) и выходила в районе передней опоры. Далее газообразный азот проходил через передний подшипник, в зазор между ротором и статором и выходил через задний подшипник.
")
Итоговый рецепт получился такой: корпус статора представлял собой емкость с центральной трубой для размещения ротора с опорами. Вокруг центральной трубы были размещены шесть катушек. Катушки у задней стенки коммутировались между собой и тремя токовыводами, к которым подсоединялись клеммы медных проводов. Там же на задней стенке крепилась горловина заправки азотом с крышкой. Для удобства заливки жидкого азота крышка заливной горловины заменялась на воронку.

Ротор состоял из вала 8 мм из нержавеющей стали (вал от сломанного струйного принтера), на который был напрессован пластиковый корпус ротора, напечатанный на 3Д-принтере, с запрессованными в него магнитами. На конце вала крепилась цапфа воздушного винта.
Передняя опора ротора была напечатана из PLA-пластика на 3д принтере и в неё вставлялся керамический подшипник. Задняя опора также напечатана 3Д принтере и также с подшипником.


Все было напечатано, склеено на суперклей, спаяно, собрано, замотано в криогель и размещено на стенд.

Первые запуски показали несовершенство конструкции. В принципе двигатель начинал вращаться, но из-за температурных деформаций клинили подшипники и ротор останавливался. А учитывая низкий крутящий момент двигателя, запустить его спустя 5 минут после заливки азотом не представлялось возможным. В какой-то момент показалось что двигатель все же начал крутиться, но вал оставался неподвижным. Как оказалось из-за низкой температуры сжался пластиковый корпус ротора и как следствие он развалился в тонких местах.

Корпус ротора был напечатан заново. После установки на вал и запрессовки подшипников корпус был обклеен стеклонитью на циакрине.
Далее была борьба с опорами и подшипниками, что-бы они не клинили сразу (это ещё пол месяца исследований, доработок и испытаний). В итоге с новым корпусом ротора и новыми опорами двигатель начал стабильно запускаться и мог продолжительное время выдавать стабильную тягу достаточную для полета самолета массой примерно 3 кг (время непрерывной работы около 1 мин).
Было решено ставить на самолет и лететь.
На тот момент у меня был пустой планер китайского самолета Hunter с размахом крыла 1,8 м. Я его немного адаптировал для установки двигателя. В частности задняя часть фюзеляжа была обрезана до точек крепления крыла для того чтобы сместить двигатель вперед и тем самым легче сбалансировать самолет.
Было решено не заморачиваться с автопилотом, а ставить радиоуправление. Итоговый вес самолета оказался в районе 3,6 кг.
У меня уже был опыт использования аппарата такой массы и на обычном бесколлекторном электрическом двигателе с резиновой катапультой этот самолет взлетал и летал продолжительное время и поэтому я решил что полет возможен (https://youtu.be/XcgAAbhTyxM).
Договорился с пилотом, выехал в поле и в итоге полет не получился.
Этому провалу сопутствовало несколько факторов:
-
Большой вес самолета при низкой мощности двигателя. Резино-катапульта разогнала самолет до начальной скорости, но низкая мощность двигателя и резкий набор высоты сразу после взлета привел к падению скорости и как следствие к падению самолета.
-
Некачественная аэродинамика. Стандартный фюзеляж планера весьма "пухлый". Также аэродинамичности не прибавляет торчащий кусок силового шпангоута к которому крепился двигатель и две вертикальные плоскости в задней части фюзеляжа образованные срезом и задней стенкой двигателя.
-
Есть ещё один фактор который по своему мог влиять на работу двигателя. Дело в том что с наружи двигатель был покрыт алюминиевой лентой на самоклеящейся основе. А учитывая небольшое расстояние между ротором и стенкой переменные магнитные поля при вращении ротора создают противо ЭДС в тонком слое фольги. И при увеличении оборотов этот эффект только усиливается (демонстрация данного эффекта на примере колебания постоянного магнита над алюминиевой плитой).
Решения были следующие:
Чтобы снизить массу самолета все детали были свешаны, измерены и создана весовая модель самолета. В итоге было решено переставить двигател\\ь ещё ближе к передней части самолета. Убрать две АКБ общей массой 1000 г. Вместо неё будет установлена одна батарея массой примерно 300 г. Для соблюдения балансировки батарею должна быть выдвинута ещё вперед на 150 мм и для этого требовался новый фюзеляж.

Новый фюзеляж так-же должен улучшить аэродинамику самолета.
Потратив ещё несколько дней. Фюзеляж был спроектирован, вырезан на станке ЧПУ. Обклеен стеклотканью и покрашен.



Алюминиевый скотч с поверхности двигателя был удален.
Помимо фюзеляжа были вырезаны силовые шпангоуты для усиления и подставка под самолет с новым фюзеляжем.

Все было собрано и снова готово к полету.
В поле, перед самым взлетом произошел отказ двигателя. После нескольких попыток запустить двигатель я прозвонил обмотки двигателя и выявил обрыв одной фазы.
Печаль.
После разбора двигателя выяснилось, что во внутренней трубе напечатанной из пластика появилась трещина. В результате уровень азота был намного ниже необходимого и верхние проводники не охлаждались. Как результат, при подаче большого тока, самый верхний проводник идущий к токовыводу перегорел.

Но самое важно что корпус из напечатанного пластика уже не подлежал восстановлению. На этот момент доступа к 3Д принтеру у меня не было.
Но был фрезерный станок ЧПУ и так настала очередь плана Б.
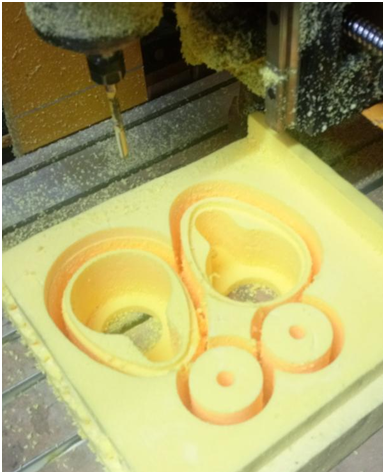
План «Б»
Было решено сделать корпус двигателя из пеноплекса на фрезерном станке с ЧПУ. В двигателе напечатанном на 3Д принтере пластик выступал как прочная оболочка обеспечивающая прочность и герметичность емкости, а поверхность теплоизолировалась криогелем толщиной 5 мм.
В новой конструкции внешний корпус статора изготовлен из пеноплекса. Он же должен обеспечивать герметичность,теплоизоляцию и частичную прочность (прямтаки ТРИЗ). Для повышения прочности корпуса снаружи пеноплекс обклеивался стеклотканью на эпоксидной смоле. В передней части двигателя также крепился силовой шпангоут из 2 мм стеклотекстолита. Внутри проходила труба для ротора и в верхней части емкости трубка для отвода газообразного азота. Обе трубки изготовлены из стеклоткани на эпоксидной смоле ЭТАЛ-Карбон Light.

Так-же заливная горловина была перенесена на боковую поверхность, так как при расположении на задней стенке воронка для заливки мешала вращению воздушного винта и после заливки перед запуском приходилось её снимать. Это не принципиально при полетах, но при отработке и испытаниях постоянно менять воронку на крышку и обратно неудобно.

Переднюю опору пришлось доработать так как в новой конструкции она вставлялась со стороны винта.

Полученная конструкция была собрана и готова к проверке.
В этот раз я решил сделать предварительное опробование на стенде без выезда в поле. И в процессе проверок двигатель сгорел опять.
Снова печаль.

Спустя два дня, моря разочарования, литра пива и 4 литров отборного чая решил предпринять последнюю попытку создать двигатель на сверх проводниках. Настала очередь плана В.
План «В»

У меня оставался второй комплект катушек намотанный на рамки. Также было ещё несколько рамок, из которых восстановил медный аналог.
За неделю восстановлен медный аналог, для предварительной проверки, отработки и настроек контроллера.
Двигатель ВТСП, который я до этого собирал и испытывал обозначен как №1. Он был разобран на отдельные элементы. Перегоревшие две катушки были заменены. Обмотки были заново скоммутированы. Была внедрена новая конструкция токовыводов.


Для медного аналога были выпилены стенки спереди и сзади, Чтобы двигатель можно было крепить аналогично криогенному. Два криогенных двигателя собирались параллельно с таким расчетом, чтобы большую часть настроек и испытаний сделать на №1, а окончательную настройку и полет выполнить на №2.

Ротор для всех трех двигателей был один.

Также на станке ЧПУ сделал простой стенд для измерения тяги и проверена его работа на обычном бесколлекторном электродвигателе.

После склейки и сборки, ещё два дня занимался настройкой различных контроллеров. Довольно неплохо подходил контроллер Marcus SL110, но после нескольких испытаний все же он сгорел. Есть особенность таких контроллеров. При запуске двигателя они могут давать длительные серии импульсов. При запуске обычного медного бесколлекторного двигателя ток ограничен сопротивлением проводов и обмоток, но в случает с двигателем ВТСП ток ограничивается сопротивлением одних подводящих проводов. По этой причине предположительно и сгорел данный контроллер.
В итоге трех дней настроек удалось получить рабочую схему из батареи литий-полимерных аккумуляторов напряжением 24 В и ёмкостью 3,5 А/ч, контроллера Castle Fenix Edge Lite, и двигателя на сверхпроводниках №2.
Все было проверено на стенде со штатной батарей и приемником радиоуправления, установлено на самолет и проверено ещё раз в сборе.

Итак настал май
2 мая я с готовым самолетом, жидким азотом и другой сопутствующей «хурмой» выехал на летное поле. Сам я рулить радиоуправляемым самолетом умею плохо, поэтому пришлось уговаривать местных пилотов. На мои просьбы отозвался Василий, хотя и предупредил, что возможно самолет разобьется. Но по сути разбить самолет у меня было намного больше шансов.

И первый полет закончился аварийной посадкой.
После взлета с резинки, самолет пролетел совсем немного и двигатель остановился. Похоже при большой нагрузке произошла рассинхронизация двигателя и контроллера, двигатель остановился и самолет совершил посадку на брюхо.
Быстрый осмотр показал что внешне все целое и было принято решение сделать вторую попытку, но на меньшей мощности.
Перед второй попыткой мы провели небольшую проверку как работает двигатель на некоторых режимах. И после определения решили взлетать.
На это раз полет оказался успешным.
На волне этого успеха хотели совершить ещё один полет, но видать подшипники снова начало подклинивать и двигатель не выдавал необходимой мощности, а в некоторые моменты он останавливался. И так мы решили что одного полета хватит и можно заканчивать эту эпопею.
Самолет взлетел, совершил короткий полет и пусть он был недолгим, но тем не менее я считаю его можно рассматривать как первый полет летательного аппарата с тягой от силовой установки на сверхпроводниках.
Что дальше? Можно улучшить конструкцию ротора для увеличения крутящего момента. Есть идея как сделать опоры в которых не будут замерзать и клинить подшипники. Сделать безрамочные катушки для улучшения охлаждения. Все это приведет к увеличению надежности, мощности и времени работы двигателя. А после этого прикрепить шасси, поставить на него автопилот для сбора информации об эффективности двигателя и сделать ещё несколько полетов..., но это уже будет второй или очередной полет - первый полет уже состоялся.
Для этого проекта продолжения не будет. Основная задача была сделать хотя бы один полет (см. начало статьи) и эта задача выполнена.
П.С. Хочу выразить благодарность сотрудникам компании «СуперОкс» за помощь, консультации и поддержку, а также за то что не пытались ограничить моё творческое безумие. Успехов Вам и хорошего финансирования на вашем долгом пути внедрения ВТСП в повседневную жизнь. Отдельна благодарность компании «SuperCam» г.Ижевск за предоставленный планер. Так-же спасибо компании «ЭНПЦ Эпитал» за консультации по эпоксидной смоле для жидкого азота.
И главная благодарность пилоту Василию, за то что не побоялся взять на себя ответственность за первый полет летательного аппарата с моим электрическим двигателем на сверхпроводниках и жидким азотом.

Комментариев нет:
Отправить комментарий