
(Betaflight 4.1, на новых настройках еще не снимал)
Прошлая статья — От земли к FPV Квадрокоптеру: Введение
На днях, я все таки решил обновиться до Betaflight 4.2 и все вокруг советуют включить фильтрацию с двухсторонним DShot. К слову она была и в 4.1.
Для начала, давайте немного разберемся, что такое фильтрация и зачем она нужна.
По умолчанию Betaflight задает общие настройки фильтрации подходящие для большинства моделей. Но для достижения наибольшего перфоманса, фильтрация может быть настроена по другому, так как ее может быть излишне или не достаточно для потрепанного квадрокоптера.
MEMS Гироскоп
У каждого квадрокоптера есть FC — Flight Controller, который по сути является мозгами. На этих контроллерах так же присутствует цифровой чип, который часто называют gyro — гироскоп. Это сенсор, который чувствует движение. Он содержит в себе маленькое електро-механическое устройство, которое так и называется — MEMS (Micro Electro Mechanical System).
Внутри этого устройства расположены механически резонирующие «вилки». Эти вилки, расположены по всем трем осям (pitch, roll, yaw) и двигаясь (механическая часть) создают флуктуации вольтажа (электрическая часть).
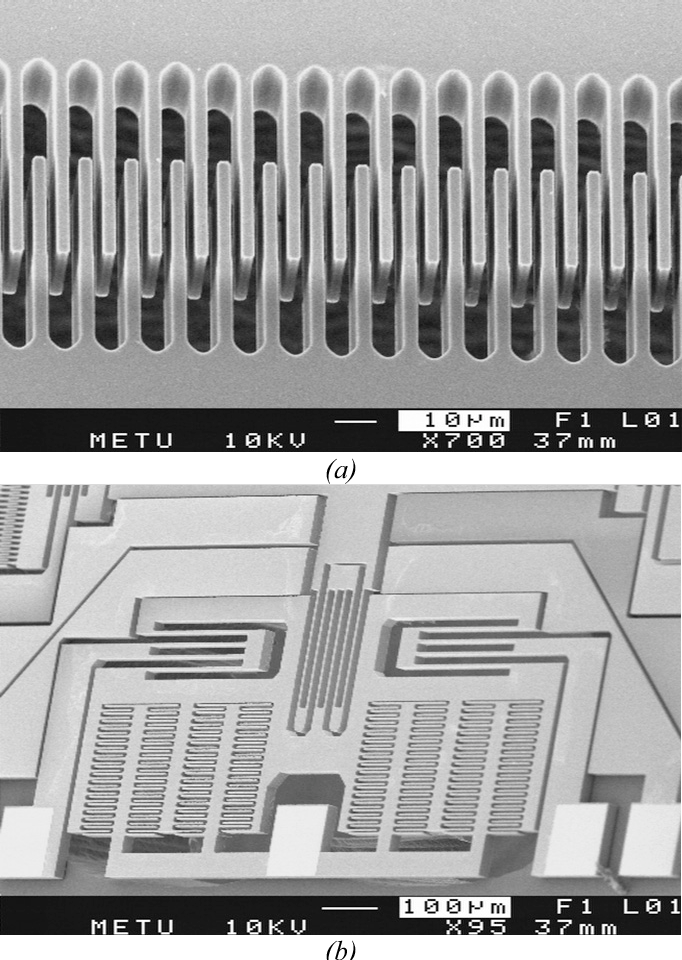
Флуктуации (колебания) вольтажа, по факту являются аналоговыми волнами, которые преобразуются в цифровую информацию для обработки полетным контроллером. Когда мы говорим 8k gyro, это значит, что 8000 раз в секунду, аналоговый сигнал превращается в цифровой и обрабатывается контроллером, прошивкой, в данном случае Betaflight.
Шум
Шум — это термин, который мы часто слышим, но, что это такое? Как правило, мы сразу же представляем звуковой шум или шумную обстановку в очередном 23 этажном муравейнике.
Гироскоп и PID контроллер сталкиваются с похожей проблемой. Так как гироскоп расположен на полетном контролере, который прикреплен к раме, он испытывает шум. Шум может исходить от: моторов, пропеллеров, ветра на скорость, общий шум от рамы, электроники etc.
PID Controller
PID Controller — это такая система которая корректирует позицию квадрокоптера согласно стикам (вашему управлению) или заданного положения (ну, что бы его не колбасило). PID настраивается за счет 3х параметров — P, I и D. К сожалению в этой статье мы не будем детально рассматривать настройку PID. Если вы пилот, то уже знаете, а если новичок, но на эту тему будет отдельная статья.
Эта система хорошо работает, когда количество шумов минимальна, иначе мы можем столкнуться с такими проблемами как осцилляция (вибрации) или перегрев моторов.
D term в PID контроллере имеет особенно отношение к шуму. D сглаживает быстрые движения, но вычисление D в PID контроллере значительно усиливает шум в сигнале. Это означает, что шум от гироскопа существенно усиливается значением D term и поэтому мы фильтруем в двух местах — гироскоп и D.
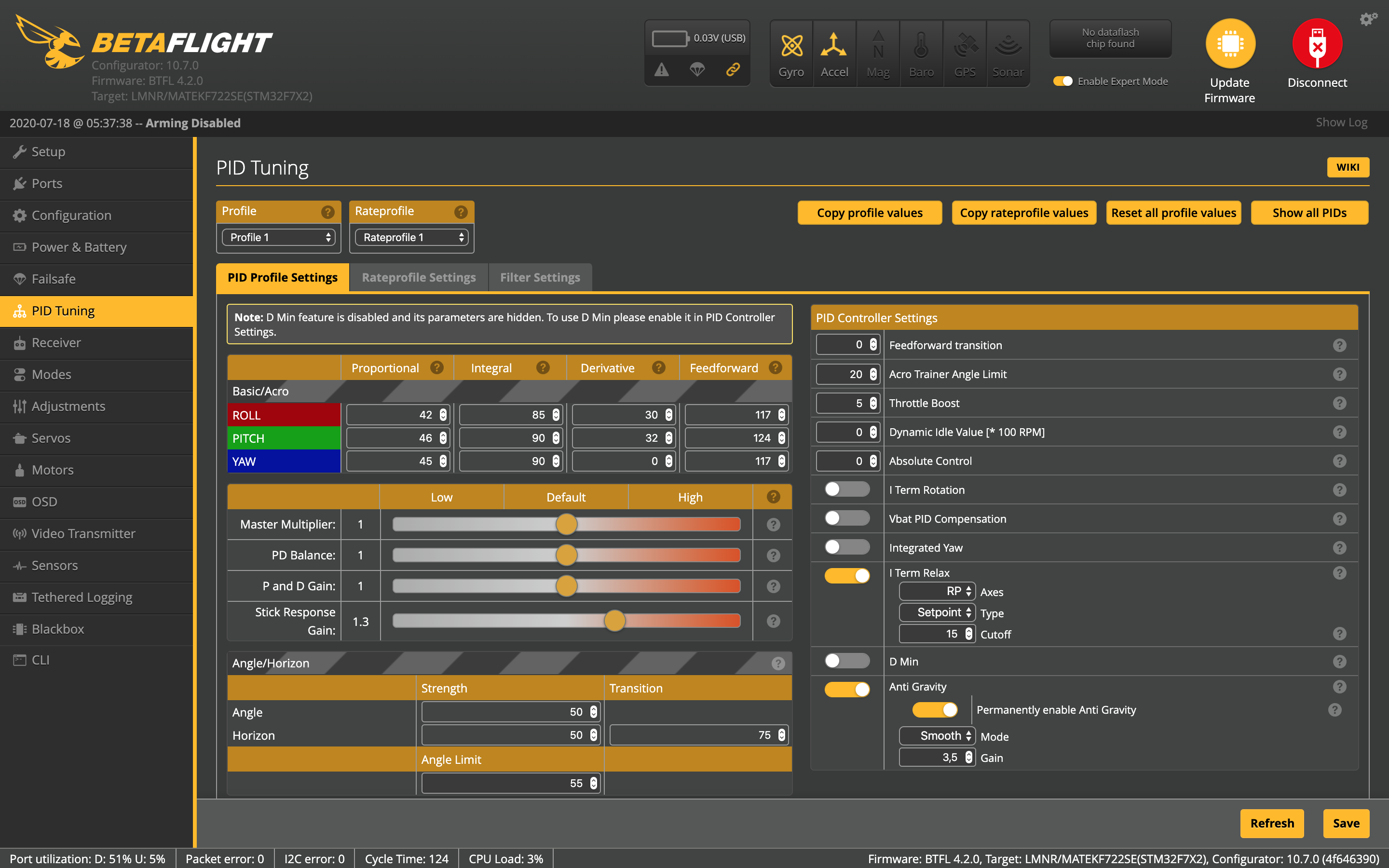
В качестве примера такого приумножения покажу вам такие вот логи:
Первый график — гироскоп
Второй график — PID
Третий — моторы
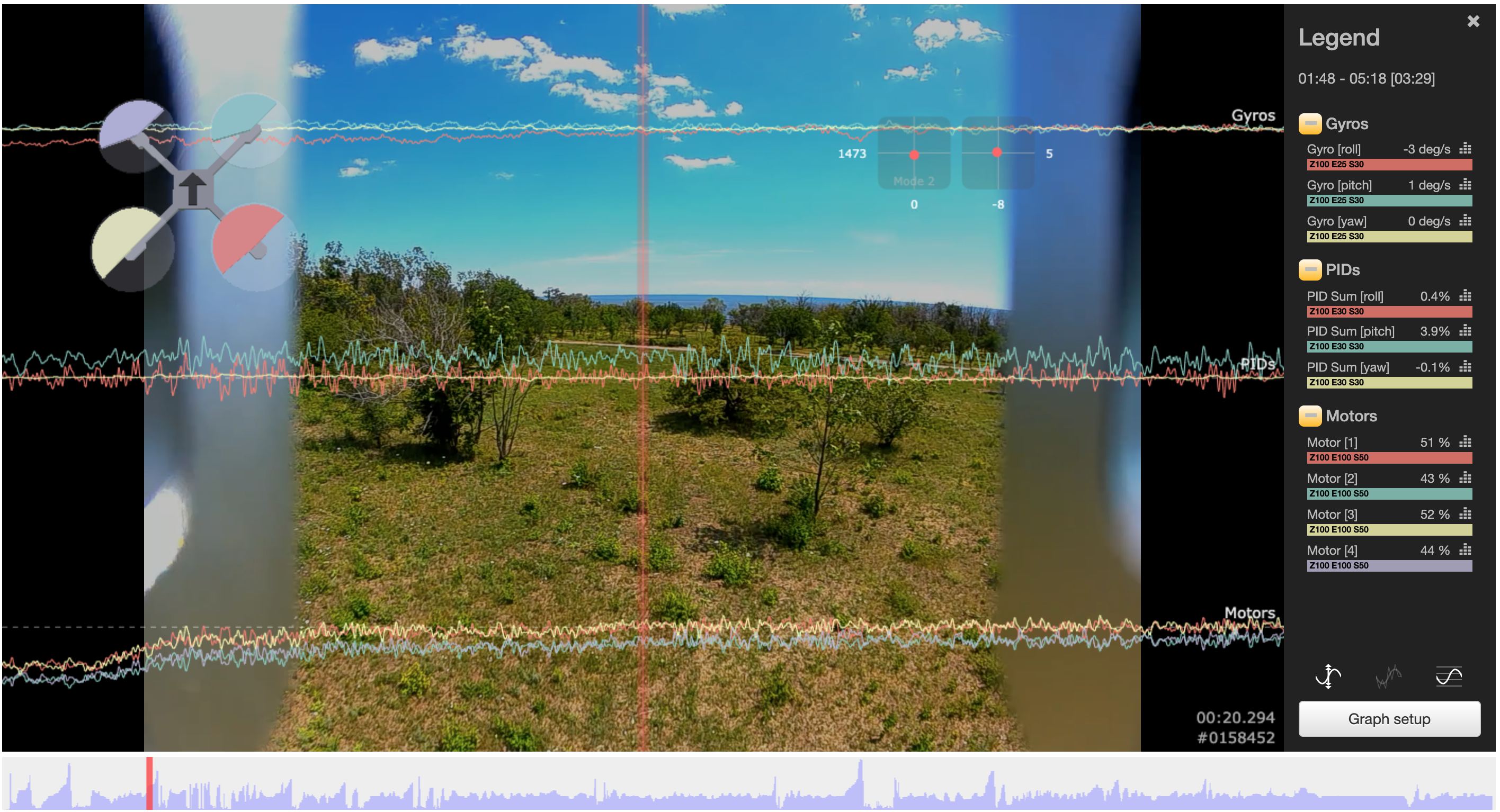
(это нормальные пропеллеры, с немного уменьшенной фильтрацией)
(Как видите вибрации от плохих пропеллеров усиливаются на этапе PID контроллера, что ведет к излишнему напрягу моторов, их буквально колбасит)
Скрины из — Blackbox Explorer.
Фильтрация
Процесс фильтрации заключается в удалении лишнего шума из сигнала от гироскопа. Но какую часть сигнала от гироскопа мы хотим оставить, а какую отфильтровать?
Честно не могу вам в красках рассказать, но так сложилось, что в бетафлайт, шум, а точней вибрации измеряются в Hz. 1Hz — одна ротация в секунду. Делается это как для простоты визуализации и работы с этими переменными. А еще, турбулентность технически называется «rate of change of rotation» — частота изменения ротации.
Скорость движения квадрокоптера лежит в районе 0-30 Hz. Выше 30Hz до 80Hz у нас находится пропвош (propwash), когда квадрокоптер трясет от турбулентности в собственных потоках. Информация в пределах 0 — 80Hz важна для PID контроллера, поэтому ее мы трогать не будем.
С помощью PIDtoolbox можно рисовать вот такие карты:

Low Pass
Фильтры
Как показывает предыдущий график — сигнал от гироскопа содержит информацию от 0 Гц до 1000 Гц, но нас интересует только диапазон 0-80 Гц, поскольку это фактическое движение квадрокоптера, о котором должен знать PID-контроллер. Таким образом, нам нужно решение для фильтрации, чтобы позволить низким частотам проходить через PID-контроллер, в то же время ослабляя высокие частоты, и для этого мы можем использовать фильтр Low Pass (Низких частот).
Фильтры нижних частот пропускают низкочастотный сигнал и ослабляют высокие частоты, которые в основном являются просто шумом.
Устанавливается частота среза, и контроллер просто уменьшает сигналы выше этой частоты. Кривая затухания позволяет не срезать все под чистую, а чем выше частота шума, тем сильней происходит его затухание, плавно.
Часто пилоты допускают ошибку устанавливая такой фильтр на той же частоте, что и видимый шум. Например на 200Hz. Поскольку фильтр плавно ослабляет шум, установка такого фильтра не даст особого результата. Фильтр стоит устанавливать на более низкие частоты. Возможно, даже на 80Hz.
Чем ниже вы устанавливаете такой фильтр, тем больше фильтрации происходит
Устанавливая фильтрацию, следует помнить об одной простой вещи. Чем больше фильтрации тем больше задержка. Понятное дело, что она в миллисекундах и не значительная, но для PID-контроллера это критично. Так как он начнет реагировать на события позже, а это значит, что он будет пытаться выровнять квадракоптер в прошлом :)
Notch фильтр
Notch переводится как зарубка, собственно это примерно так и выглядит:
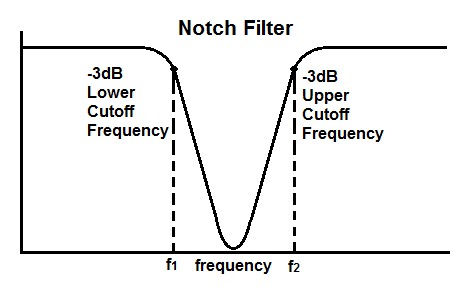
Фильтра откидывают часть шума ниже и часть шума выше. Начиная с Betaflight 3.1 эти фильтры являются динамическими, и подстраиваются под различный шум.
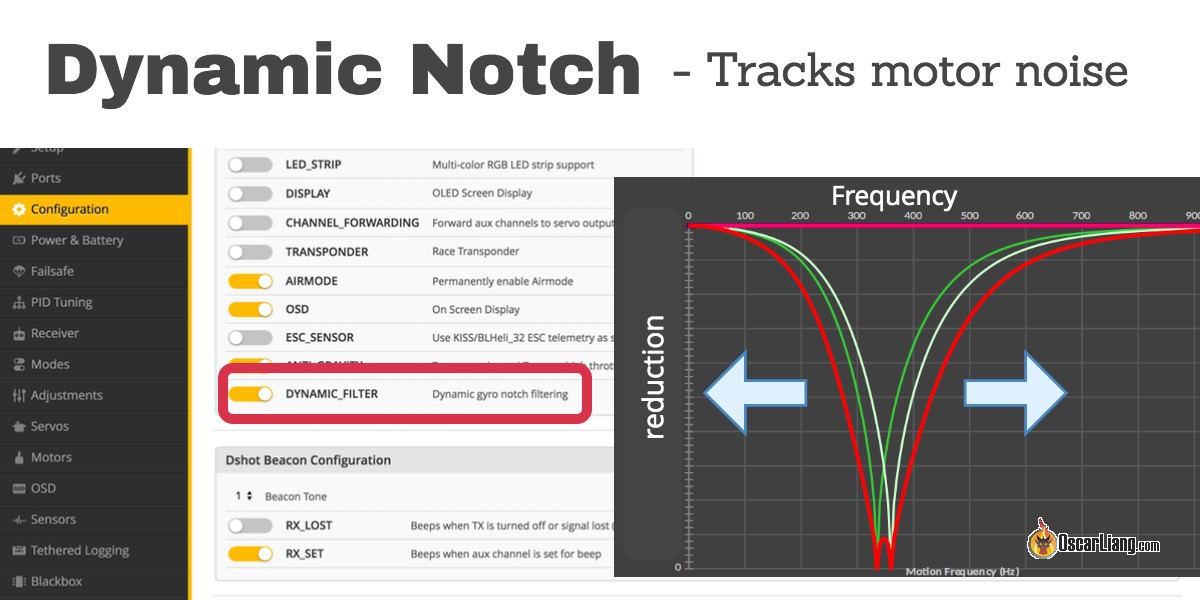
Фильтра используются в связке с Low Pass фильтрами, но используются уже для фильтрации шумов от моторов, которые находятся выше.
D term фильтрация
Как было сказано выше, D способен приумножать шумы от гироскопа, поэтому в Betaflight есть фильтрация D. Ниже на грификах видно уровень шума до фильтрации и после.
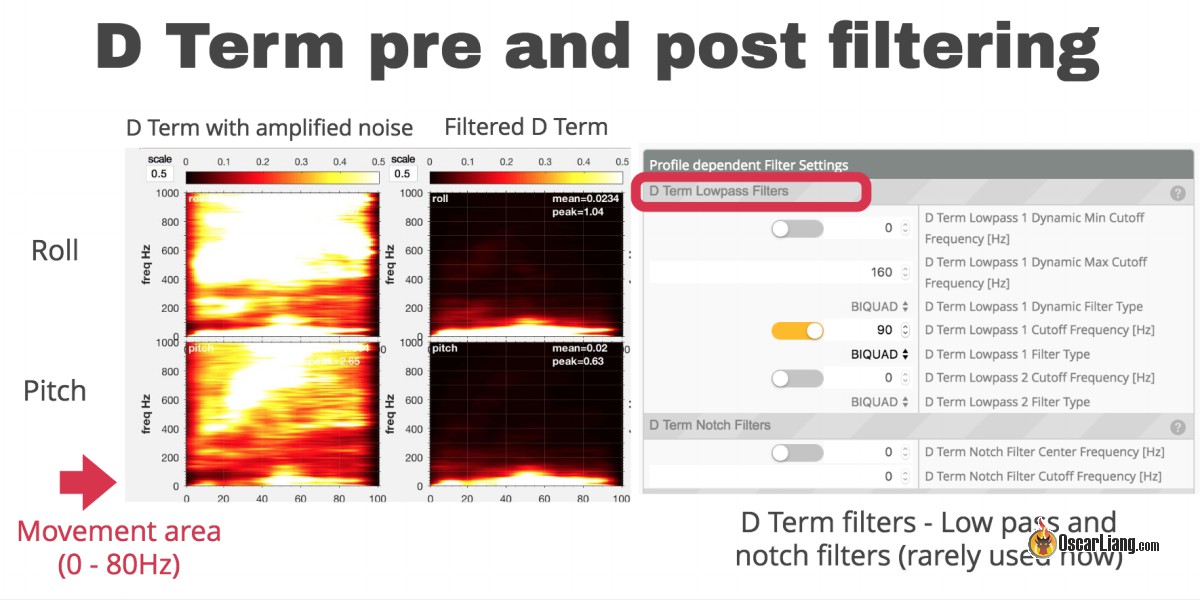
В сообществе нет четкого понимания, стоит ли сильно фильтровать D или нет. Но есть правило горячих моторов, чем меньше фильтрация и чем выше D, тем сильней они греются и могут даже сгореть. Но и в обратную сторону мы получаем задержку.
RPM Filter
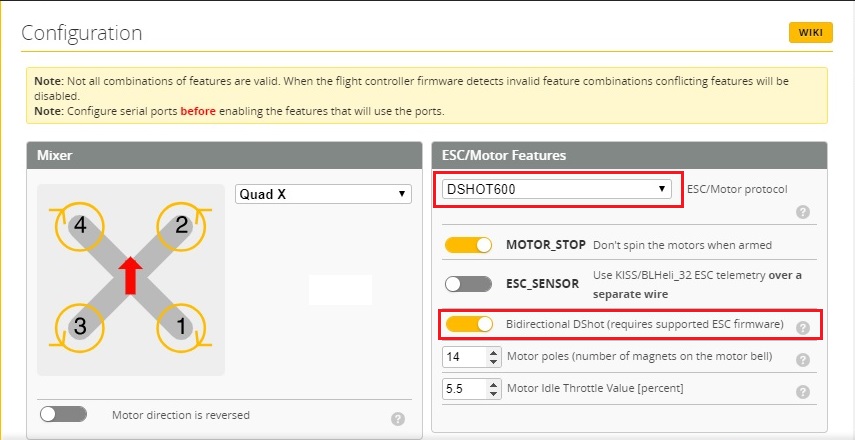
Так вот, собственно, что новое я стал использовать, так это RPM фильтрацию. Она работает за счет двух стороннего протокола DSHOT который позволяет полетному контроллеру узнать точное количество оборотов конкретного мотора. И уже на основании этих данных применяется фильтрация.
(Ваш ESC должен поддерживать двух сторонний DHSOT)
Прошивка на ESC, от 3.7
Если моторы греются, то это проблема. Горячие моторы могут быть признаком того, что на моторы попадает много шума и они пытаются реагировать на вибрации так часто, что начинает выделяться тепло.
Греться моторы могут по ряду причин, старая рама, погнутые колокола у моторов, нарушенная балансировка, лишние прибомбасы на вашем коптере.
Конечно лучше иметь, как говорят clean build, и что бы все было новое, но можно сперва попробовать настроить фильтрацию.
Для начала можно начать с увеличения фильтрации D, делать шаги в 20 Hz. Проверяйте температуру после каждого такого шага и найдите свой оптимальный диапазон.
А искать его следует между температурой моторов и вибрациями. Как было сказано выше, хоть и фильтрация призвана уменьшить количество шума, она может накладывать некоторые задержки и PID контроллер может не успевать. И как бы это смешно не было, вызывать вибрации. Но эти вибрации не относятся к пропвош. Это уже просто неэффективная работа PID.
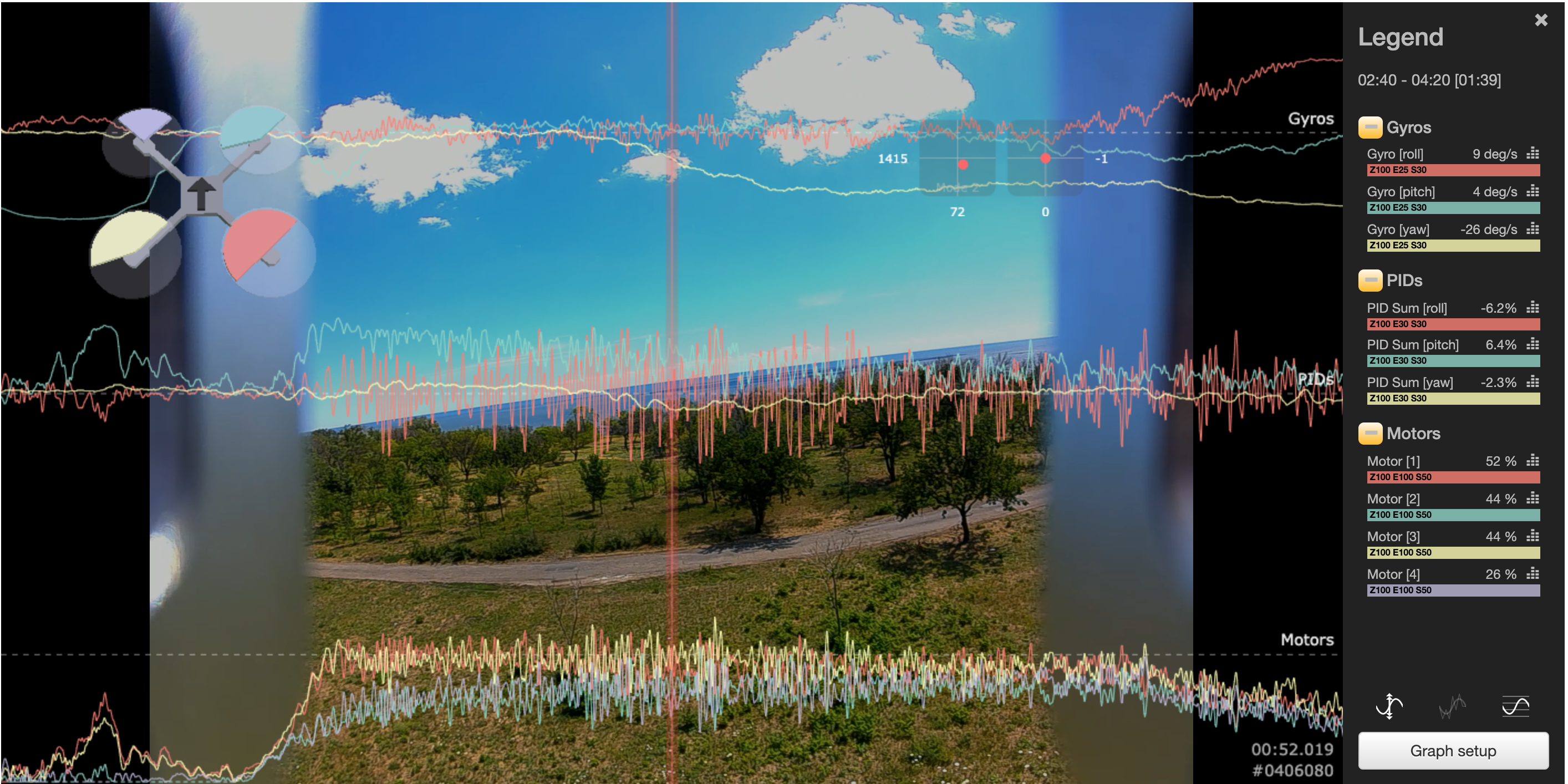
В последних версиях Betaflight есть ползунки, пробуйте не менять значения самих фильтров, а попробуйте использовать эти «мастер» ползунки.
На текущий момент у меня такие настройки с включенным RPM фильтром, возможно я попытаюсь уменьшить фильтрацию еще больше:

Комментариев нет:
Отправить комментарий